Усилитель рулевого управления: история регулятора ваших мышечных усилий
Не зря первой компанией, заинтересовавшейся в устройстве, стал именно Cadillac – ведь шестнадцатицилиндровые монстры не только ездили быстро, они еще и были очень тяжелыми. В 1934 году Дэвис стал работать на General Motors. Однако ввиду большой стоимости тонкой гидравлики и экономического кризиса, вызвавшего падение продаж автомобилей, гидроусилитель не стал частью стандартной комплектации автомобилей GM, а конструктор уже в 1936 ушел в компанию Bendix и там продолжал совершенствовать свою систему.
К 1939 году были разработаны системы гидроусиления дести типов, и две из них проданы корпорации GM для экспериментальной установки на автомобилях Buick. В 1940 году они были вновь востребованы на бронеавтомобилях Chevrolet, и в результате к концу войны более 10 тысяч машин были оснащены ими, а конструкция была действительно отлажена для массового производства.
А вот в Европе дела продвигались не так хорошо. Например, компания Цанрадфабрик, более известная как ZF, выпускала простые рулевые редукторы без гидроусилителей для машин с нагрузкой на ось до 6,5 тонн, а значит, даже водители тяжелых грузовиков тогда обходились без «помощников». Ситуация начала меняться только в середине шестидесятых, когда увеличение требований к труду водителей грузовиков привело к появлению спроса на системы гидроусиления. А вот на легковых машинах водители справлялись в основном своими силами вплоть до восьмидесятых годов, когда рост снаряженной массы машин, их скоростей, требований к безопасности и переход на передний привод, а значит и рост массы, приходящейся на переднюю ось, привели к необходимости внедрения усилителей рулевого управления даже на малолитражках.
Особенности конструкции
Конструкция гидроусилителя, предложенная Дэвисом, оказалась настолько удачной, что, по большому счету, мало изменилась до нашего времени.
Суть идеи Фрэнсиса Дэвиса состояла в том, что поток масла от насоса идет постоянно, а не только тогда, когда требуется создать давление. При повороте руля начинает скручиваться торсионный стержень, связывающий вал рулевой колонки и редуктор рулевого управления. При этом в золотниковом распределительном механизме открываются отверстия, направляющие жидкость от насоса в правый или левый рабочий цилиндр гидроусилителя. Чем больше закручивание торсиона, тем больше отверстий золотника открывается, и тем больше насос помогает вращать руль. Основные усилия в совершенствовании этой простой схемы были направлены на уменьшение потерь в системе привода, составляющих не менее 90 ватт даже на самых современных системах, обеспечение более комфортного регулирования усилия на руле, увеличение степени помощи при маневрировании на малой скорости и «утяжеление» руля на трассе.
Дальнейшие усовершенствования
Уменьшение затрат на привод шло по пути совершенствования гидравлики, насоса и его привода. Типичные затраты на привод – это потери на работу передачи, например, ремня (около 10 ватт), потери в насосе (для самых совершенных систем это 40 ватт в простое) и потери в распределительном механизме (это еще 20 ватт). Более ранние системы потребляли заметно большую мощность – так, отчет об испытаниях большого мотора V8 компании GM говорит о почти 500 ваттах потерь мощности при установке на мотор насоса гидроусилителя. Можете себе представить, каков был размер проблемы при использовании не вполне исправных или менее совершенных компонентов.
Для снижения затрат на привод насоса ГУР, когда усиление не требуется, и, собственно, регулирования степени усиления рулевого привода в первую очередь начали совершенствовать насос. Первые системы насосов переменной производительности пришли из систем гидропривода и оказались излишне сложными для массового применения на легковых машинах, но иногда встречаются на грузовиках. Конструкции могут быть различными – лопастными, радиально- или аксиально-поршневыми, но их все объединяет сложность и редкость, поэтому они не устанавливались на легковые машины ввиду большой массы, размеров и цены. Компактным вариантом такой конструкции является, например, насос ГУР Subaru, где шиберный насос имеет внешнее кольцо, которое может менять свое положение относительно центра ротора.
www.kolesa.ru
8. Рулевой электропривод. Требования и принцип построения
8. Рулевой электропривод. Требования и принцип построения.
Руль, рулевая машина, элементы управления, защиты и контроля составляют рулевое устройство судна. Рулевое устройство предназначено для обеспечения управляемости судна: удержания его на заданном курсе, изменения курса и маневрирования. Для привода руля используют ЭД, которые в сочетании с передаточным механизмом и органами управления образуют рулевой электропривод.
Классификация РЭП.
Основным классификационным признаком является тип передачи крутящего момента от электропривода к баллеру руля. В практике применяются приводы двух основных типов: механические и гидравлические.
Механические приводы состоят из систем зубчатых передач, дающих постоянное или почти постоянное передаточное число от баллера руля к валу двигателя. Механические приводы подразделяются на:
— винтовые;
— секторные, применяемые главным образом на судах транспортного флота;
— штуртросовые, имеющие электрическую рулевую машину, устанавливаемую в рубке, и тросовую передачу от неё к баллеру руля. Эти приводы используются преимущественно на речных судах.
Гидравлические приводы получили наибольшее распространение и являются основными на всех судах нашего флота. Эти приводы могут быть разделены на две группы:
— приводы с постоянно установленной гидравлической системой управления и изменением направления движения жидкости путем реверсирования двигателя;
— приводы с насосом переменной производительности, в которых при постоянном направлении вращения двигателя, соединенного с насосом, изменяется направление движения жидкости в системе путем регулирования в самом насосе. Эта группа приводов наиболее распространена.
Основные требования, предъявляемые к РЭП.
Рулевое устройство — одно из важнейших на судне. Выход этого устройства из строя ведет к потере управляемости, а иногда и к гибели судна.
Безаварийная работа рулевого устройства во многом зависит от надежности рулевого электропривода. Поэтому к РЭП предъявляют жесткие требования.
Рулевой электропривод должен обеспечивать:
— перекладку руля с борта на борт на полном переднем ходу судна за время не более 28 с;
— непрерывную перекладку руля с борта на борт на полном переднем ходу судна в течение 30 мин;
— длительную работу при ходе по курсу в режиме не менее 350 перекладок в час;
— изменение вращающего момента электродвигателя в пределах от 0 до 200% номинального;
— режим стоянки электродвигателя под током в течение 1 мин с нагретого состояния;
— безотказность, надежность и живучесть в течение всего периода эксплуатации судна;
— ограничение момента двигателя при перегрузке или заклинивании руля вплоть до его полной остановки и выхода его на автоматическую характеристику при прекращении перегрузки;
— автоматическое удержание руля на заданном курсе как при отрицательном моменте на баллере, так и при остановке привода без применения механических тормозов;
— удобство, простоту управления и постоянный контроль работы привода;
— возможность управления из разных мест: ходовой рубки, верхнего мостика, румпельного отделения;
— автоматическое ограничение предельных углов перекладки.
Рулевые электродвигатели работают либо в повторно-кратковременном, либо в длительном режиме, что зависит от вида передаточного механизма.
Так, механической передаче свойствен повторно-кратковременный режим с включением электродвигателя для каждой перекладки руля. Двигатели насосов переменной производительности электрогидравлических рулевых машин работают в длительном режиме с примерно постоянной скоростью, без реверса и без остановки в течение всего времени плавания судна.
Электродвигатели рулевых приводов с механической передачей должны иметь мягкие механические характеристики, так как это обеспечивает:
а) при заклинивании пера руля или заедании в механизме передачи переход двигателя в режим короткого замыкания с таким моментом на валу, который не вызовет поломки оборудования;
б) смягчение динамических усилий в электроприводе при ударах волн о перо руля;
в) замедление скорости двигателя с увеличением нагрузки, вызванным различными причинами, а стало быть, и ограничение потребляемой мощности.
Удовлетворению перечисленных требований способствует то, что в рулевых электроприводах с механической передачей применяются двигатели постоянного тока с независимым возбуждением, работающие в системе генератор — двигатель. Получение мягкой механической характеристики двигателя при этом обеспечивается противокомпаундной обмоткой генератора.
При гидравлической передаче можно использовать электродвигатели на постоянном и на переменном токе, но уже без ограничений в отношении степени жесткости механических характеристик, поскольку гидравлическое рулевое устройство само обеспечивает необходимую амортизацию ударных нагрузок и ограничение давления в системе в пределах допустимых значений. Наибольшее распространение для электропривода насоса переменной производительности получили при переменном токе — асинхронные двигатели с короткозамкнутым ротором типа АМ, при постоянном токе — двигатели типа П со смешанным возбуждением.
Режим работы рулевого электропривода зависит от хода судна. Во время выполнения судном маневренных операций рулевой перекладывает руль с борта на борт на максимальный угол. На этот режим работы и рассчитывают мощность двигателя, которая обусловливается значениями момента статического сопротивления заданного времени перекладки руля (скорости двигателя).
При ходе судна но курсу роль рулевого электропривода сводится к удержанию судна на заданном курсе, для чего производится частая перекладка руля (до 350 в 1 ч) па небольшой угол (обычно 4-6°). Такой режим работы, хотя и не вызывает больших моментов на валу, но может вызвать нагрев двигателя из-за многократных пусков и остановок.
Таким образом, двигатель рулевого электропривода рассчитывают с учетом обеспечения максимального момента и заданного времени перекладки руля с борта на борт при выполнении судном маневренных операций на полном переднем ходу. Выбранный двигатель проверяют на нагрев при работе в таком режиме в течение 30 мин. Иногда двигатель проверяют на нагрев при длительном удержании судна на заданном курсе, но обычно такая проверка, как и проверка на обеспечение заднего хода со средней скоростью, показывает значительный запас мощности двигателя, выбранного по результатам предыдущих расчетов. Поэтому от дополнительных проверок часто отказываются.
studfile.net
Механизмы рулевого устройства, рулевые приводы, рулевые машины
Назначение и требования к рулевым устройствам
Рулевое устройство предназначено для изменения поворота судна и удержания его на курсе путем поворота руля на определенный угол или удержания его в диаметральной плоскости судна.
В состав рулевого устройства входят четыре основных узла:
- руль — для восприятия давления воды и поворота судна;
- рулевой привод — для связи с рулевой машиной и передачи вращающего момента на баллер;
- рулевая машина (двигатель)—для обеспечения работы рулевого привода;
- телединамическая передача (телемотор) —для связи рулевой машины с постами управления судном.
Все суда морского флота оборудуются основной механической и запасной ручной или механической рулевой машиной. По требованию Регистра мощность основной рулевой машины и привода должна быть достаточной для перекладки руля с, борта на борт (2X35°) за время не более 30 сек на полном переднем ходу судна. Ручной привод должен перекладывать руль за время не более 100 сек при этих же условиях. Мощность запасного механического привода должна быть достаточной для перекладки руля с 20° одного до 20° другого борта за время не более 60 сек при скорости переднего хода, равной половине полной, но не менее 6 узлов. Переход с основного привода на запасной не должен занимать более двух минут.
Рулевое устройство должно быть экономичным, надежным и безопасным в работе независимо от навигационных условий, в которые может попасть судно. На судне должно быть предусмотрено не менее двух разных постов управления рулевых устройств.
Рули
По конструктивному исполнению рули подразделяются на простые, полубалансирные, балансирные, обтекаемые и т. д., а по принципу действия — на пассивные и активные.
Пассивным называется руль, который воспринимает и передает только силу давления воды на перо. Активный руль, помимо этой силы, передает еще и силу упора собственного движителя, размещаемого в грушевидной насадке пера руля. Привод движителя монтируется совместно с ним или выносится в судовое помещение.
Активный руль повышает маневренность судна, позволяя перекладывать руль до 70—90° на борт, и может давать приращение скорости судна на 1,5 узла, имея мощность привода движителя от 8 до 11% от мощности главных двигателей.
Схема активного руля приведена на рис. 67. Гребной винт руля соединен с валом электродвигателя эластично. Питание к электродвигателю подводится по кабелю, проходящему через гельмпортовую трубу вдоль баллера. Двигатель охлаждается водой и внутренние поверхности его покрыты антикоррозионным лаком, являющимся одновременно и электроизоляцией. Управляется активный руль непосредственно с мостика.
Рулевые приводы
По конструктивному исполнению и принципу действия рулевые приводы подразделяются на:
- румпельные и секторные со штуртросной передачей;
- винтовые механические;
- ледокольного типа;
- секторные с зубчатой передачей;
- гидравлические;
Первый тип привода применяется при значительном удалении рулевой машины от руля и в настоящее время встречается лишь на малых судах.
Винтовые механические приводы применяются исключительно редко, да и то в качестве запасных.
Ледокольный привод представляет собой мощный румпель с расположенной на нем паровой рулевой машиной.
Этот привод применялся на паровых ледоколах старой постройки.
Некоторое распространение имеет секторный зубчатый привод на судах.
Одна из конструкций привода показана на рис. 68. Сектор насажен на баллер свобод¬но и находится в зацеплении с зубчатой шестерней, приводимой во вращение от вала рулевой машины. Посредством амортизационных пружин сектор соединяется с румпелем, плотно насаженным на баллер на шпонке.
Амортизационные пружины предназначены для передачи движения на румпель и для гашения динамических нагрузок руля, могущих привести к поломкам зубьев сектора и шестерни.
Современные недавно построенные и вновь строящиеся суда оборудуются в подавляющем большинстве гидравлическими рулевыми приводами, которые подразделяются на плунжерные (скальчатые), винтовые, плунжерные секторно-кольцевые и лопастные.
Плунжерные (скальчатые) приводы изготовляются двух- и четырех-скальчатыми. Двух- скальчатый рулевой гидропривод приведен на рис. 69. Цилиндровые скалки соединены между собой скользящей муфтой или подшипником румпеля.
Румпель скользит в подшипнике и одновременно, испытывая давление со стороны скалок, поворачивается. Направление движения скалок зависит от направления подачи рабочего масла в цилиндры привода. Цилиндры соединяются между собой трубопроводами с перепускными клапанами, которые срабатывают при резком возрастании нагрузки в одном из цилиндров.
Винтовой гидравлический привод приведен на рис. 70, а. Корпус и цилиндр привода жестко закреплены на фундаменте. К корпусу крепится верхняя крышка, изготовленная заодно с резьбовой втулкой, внутри которой проходит свободно баллер.
На баллере в нижней части сидит неподвижно на шпонке стакан с внешними шлицами. Шлицами соединяется со стаканом кольцевой поршень, имеющий также резьбовое зацепление с верхней крышкой привода. Соответствующие места уплотнены внутри привода кольцами из маслостойкой резины.
При подаче рабочего масла в верхнюю полость 8 поршень будет опускаться вниз и одновременно поворачиваться в резьбе крышки. Вращение передается баллеру и руль поворачивается. Из нижней полости масло отводится к насосу. Для обратного поворота руля рабочее масло подается в нижнюю полость и отводится из верхней полости привода. Поршень будет двигаться вверх, а руль — поворачиваться в противоположном направлении.
На квадратную головку баллера может надеваться румпель запасного привода. Конструкция винтового гидравлического привода компактна, но сложна, и сам привод имеет сравнительно низкий механический к.п.д.
Плунжерный секторно-кольцевой гидравлический рулевой привод показан на рис. 70, б. Этот привод получил некоторое распространение на современных морских судах иностранного флота.
Кольцевой цилиндр привода разделен перемычкой на две рабочие полости, в которых помещены пустотелые плунжеры, перемещающиеся по кольцевым рабочим полостям цилиндра. Разделительная перемычка имеет два отверстия, через которые производится подвод и отвод рабочего масла из полостей цилиндра. Рабочее масло давит на торец плунжера и заставляет его перемещаться. Торец плунжера оборудован уплотнением из маслостойкой резины для предотвращения протечек масла из полости цилиндра наружу.
Румпель насажен на баллере на штоке и входит своим приводным концом в специальную втулочную перемычку плунжеров. Секторно-кольцевой привод прост по устройству, но имеет серьезный эксплуатационный недостаток — трудность обеспечения внутреннего уплотнения.
Очень большое распространение в настоящее время получил лопастной гидравлический рулевой привод. Основными узлами его являются цилиндр с крышкой и ротор. Ротор представляет собой ступицу с закрепленными на ней или изготовленными совместно рабочими лопастями и насаживается на конический конец баллера или промежуточный вал на шпонке. Встречаются цельнолитые конструкции ротора, присоединяемого к баллеру фланцевым соединением. Изготовляются лопастные рулевые приводы и в нашей стране и за рубежом.
Рулевые машины
В некоторых литературных источниках и в производственной практике понятие о рулевой машине, часто отождествляют с понятием всего рулевого устройства или рулевого привода. Это неправильно, так как рулевая машина — лишь составная часть рулевого устройства.
На судах морского флота применяются паровые, электрические, гидравлические и ручные рулевые машины. Ручная машина и ручной привод играют только вспомогательную роль. Мощность рулевых машин составляет от 0,60 до 0,65% от мощности главного двигателя в 3000 л. с. и 0,18—0,19% при мощности главного двигателя 60 000 л. с.
Замена парусного флота паровым привела к быстрому росту скорости и водоизмещения судов. Условия ручного штурвального управления рулем затруднились и возникла необходимость применения механических рулевых машин. Основной энергией на паровых судах была энергия пара и поэтому прежде всего стали применяться паровые рулевые машины.
Рулевое устройство судна оборудуется одной паровой маши¬ной. Машина двухцилиндровая в вертикальном или горизонтальном исполнении. Через цилиндрическую зубчатую или червячную передачу рулевая машина передает мощность зубчатому сектору или грузовому барабану при штуртросном рулевом приводе.
Рулевая машина должна сразу же пускаться из любого положения, и реверс должен осуществляться без задержки. Поэтому машина работает без расширения пара и мотыли расположены под углом 90° друг к другу. Паровые золотники машины не имеют перекрышей, каждый цилиндр снабжен своим золотником и устанавливается третий пусковой золотник. Схема парораспределения рулевой паровой машины приведена на рис. 71. На двух частях рисунка пусковой золотник показан в своих крайних положениях. Движение пара и поршней машины показано стрелками. При среднем положении пускового золотника доступ пара к цилиндрам прекращается и машина останавливается. Скорость вращения вала рулевой машины и перекладки руля при работе рулевого устройства зависит от величины открытия паровых окон пусковым золотником, т. е. от количества подаваемого в цилиндры пара.
Цилиндровые золотники приводятся в движение от вала рулевой машины, а пусковой золотник — с мостика. Пусковой золотник связан с валом рулевой машины сервомотором, т. е. устройством для согласования действий штурвала и рулевой машины, которое служит для возврата пускового золотника в среднее положение после прекращения воздействий с мостика или другого поста управления.
Паровые рулевые машины оборудуются клапанами экономии, устанавливаемыми между пусковым золотником и стопорным паровым клапаном. Назначение клапана экономии — прекратить доступ пара к пусковому золотнику несколько раньше, чем он придет в среднее положение. В среднее положение золотник возвращается сервомотором, но не сразу, а в течение некоторого времени. Доступ пара в цилиндры машины постепенно прекращается и вращение ее замедляется. Наконец, наступает такой момент, когда паровая машина не может преодолеть силы сопротивления в рулевом устройстве из-за малого количества поступающего в нее пара и останавливается раньше, чем пусковой золотник станет в среднее положение. Паровые окна не будут закрыты полностью и через них свежий пар будет постоянно перетекать в магистраль отработавшего пара. Для предотвращения этих бесполезных утечек свежего пара устанавливается клапан экономии. Клапан может приводиться в действие автоматически от давления пара или механически от общего привода с пусковым золотником.
Электрическая рулевая машина представляет собой обычный электродвигатель постоянного или переменного тока, на валу которого закрепляется червяк, работающий в паре с червячным колесом. На одном валу с червячным колесом укрепляется прямозубая шестерня, входящая в зацепление с зубчатым сектором рулевого привода.
Во многих случаях рулевое устройство оборудуется двумя электродвигателями: рабочим и резервным. Установка их выполняется с учетом возможности осевого перемещения и вывода из зацепления с червячным колесом при переходе с одного электродвигателя на другой или на запасной привод. Для предотвращения чрезмерного поворота зубчатого сектора устанавливаются конечные выключатели, прерывающие питание электродвигателя током.
Электрогидравлическая рулевая машина представляет собой электроприводной насос, перемещающий рабочее масло в системе гидропривода. Применяются ротационные насосы (поршневые, винтовые, пластинчатые) и шестеренные с переменной и постоянной производительностью. Устанавливаются также две рулевые машины—рабочая и резервная.
Ротационный радиально-поршневой насос рулевой машины приведен на рис. 72.
Насос состоит из корпуса, регулировочного кольца и ротора. Основу ротора составляет звезда цилиндров, вращающаяся вместе с поршнями. Поршни имеют башмаки, а в некоторых конструкциях ролики, которые скользят по внутренней поверхности регулировочного кольца. Регулировочное кольцо выполняет роль пускового золотника, связано своими цапфами с телемотором и сервомотором и имеет возможность поперечного перемещения. Центральная полость звезды цилиндров разделена на две части неподвижной горизонтальной перегородкой. Каждая часть полости сообщается через отверстия с трубопроводами рулевого привода.
Средний рисунок насоса показывает нахождение регулировочного кольца в нейтральном или среднем положении. При вращении ротора поршни не имеют возвратно-поступательного движения и насос не производит перемещение рабочего масла. Этот момент соответствует удержанию руля в заданном положении.
Крайние рисунки показывают расположение регулировочного кольца в своих крайних положениях, что соответствует максимальной производительности насоса и максимальной скорости перекладки руля. При вращении ротора в направлении, указанном стрелкой, отвод регулировочного кольца вправо обеспечивает всасывание масла в центральную полость насоса через верхнее отверстие, а нагнетание — через нижнее. С отводом кольца влево всасывание будет производиться через нижнее отверстие, а нагнетание — через верхнее. Таким образом изменяется направление движения масла в трубопроводах и направление поворота привода и перекладки руля.
Ротор насоса вращается с постоянным числом оборотов. Напор насоса постоянный, а производительность переменная и зависит от степени отвода регулировочного кольца от среднего положения. Такой насос называется насосом с регулируемой производительностью.
Отечественное рулевое устройство РЭГ-ОВИМУ-7 с лопастным рулевым приводом, разработанное под руководством В. В. Завиша, приведено на рис. 73.
Рулевой привод двухлопастной и состоит из цилиндра и ротора. Ротор цельнолитой и имеет фланец, при помощи которого присоединяется к баллеру. Рулевая машина электрогидравлическая, насос ротационный пластинчатый марки Г-12-14 (ЛЗФ-70) постоянной производительности 73 л/мин при 1000 об/мин и мощности 5,6 квт. Рабочая жидкость — турбинное масло 22. Допускается применение и другого, более вязкого, масла. Давление масла в системе 35 кГ/см2.
На рисунке руль стоит в заданном положении, насос разгружен и работает вхолостую, перемещая масло в направлении, указанном сплошными стрелками через отверстия г, е и б.
Для перекладки руля на правый борт каретка приемника телемотора отводится вправо воздействием на нее давления жидкости, перемещаемой в системе телемотора вращением рулевого штурвала. Золотники распределительного устройства переместятся вправо и отверстия д и в откроются, а отверстие е закроется. Масло будет перемещаться в системе в направлении, указанном пунктирными стрелками, и поступать в цилиндр привода через отверстия г и в. Ротор привода и руль будут поворачиваться против часовой стрелки.
Чтобы удержать руль в нужном положении, рулевой перестает вращать штурвальное колесо и сервомотор возвращает золотники распределительного устройства в среднее положение. Насос начинает работать опять вхолостую.
Для перекладки руля на левый борт рулевой вращает штурвальное колесо в обратном направлении. Каретка телемотора отводится влево и в этом же направлении переместится распределительный золотник (нижний), а разгрузочный золотник опять передвинется вправо. Масло теперь будет идти к приводу через отверстия г и д, а от привода — через в и б. Ротор привода и руль будут поворачиваться по часовой стрелке.
Распределительный и разгрузочный золотники связаны с ротором привода системой рычагов, представляющих собой сервомотор. Ротор всегда оказывает на золотники действие, обратное действию телемотора. Поэтому с прекращением вращения штурвального колеса действие телемотора прекращается и ротор рулевого привода своим движением приведет золотники в среднее положение через систему сервомотора.
Чтобы показания аксиометра совпадали с действительным положением руля, предусмотрен возврат разгрузочного золотника в среднее положение лишь после того, как распределительный золотник станет в среднее положение. Для этого к разгрузочному золотнику придан фиксатор в верхней части. При отводе золотника из среднего положения поршень фиксатора опускается вниз под действием давления пружины и застопоривает разгрузочный золотник. Когда распределительный золотник станет в среднее положение и закроет окна див, перераспределением гидравлического давления на поршень фиксатора последний поднимется вверх и даст возможность пружине разгрузочного золотника вернуть его в среднее положение.
В системе рулевого устройства предусмотрены предохранительный клапан для перепуска масла в случае заклинивания разгрузочного золотника в правом положении и перепускные клапаны для сброса масла из одной полости привода в другую при сильных ударах волн о перо руля.
Сервомоторы и телемоторы
Сервомотор — обязательный элемент каждой рулевой машины. Принцип действия всех сервомоторов одинаков, а конструктивное исполнение разное и зависит от типа рулевой машины и рулевого привода.
Одна из конструкций сервомотора паровой рулевой машины приведена на рис. 74.
Рабочий вал лежит в подшипниках и имеет опорные диски, препятствующие осевому перемещению вала. Рулевой штурвал выполнен совместно со ступицей, имеющей резьбовую нарезку. Ступица навинчена на вал и имеет кольцевой паз, куда входят выступы углового вильчатого рычага. Рычаг связан со штоком пускового золотника.
Для перекладки руля рулевой вращает штурвал, который навинчивается или вывинчивается с вала и перемещается по оси. Перемещение ступицы штурвала приводит к повороту углового рычага, который выводит пусковой золотник из среднего положения, и рулевая машина начинает работать. Через шестеренную передачу вращение вала рулевой машины передается рабочему валу, который оказывает на ступицу штурвального колеса действие, обратное действию рулевого, и будет стремиться вернуть штурвальное колесо и пусковой золотник в среднее положение.
Если скорость вращения штурвального колеса будет равна скорости вращения рабочего вала, пусковой золотник будет находиться в заданном положении и рулевая машина будет работать с постоянной скоростью. Для увеличения скорости вращения рулевой машины и перекладки руля рулевой должен вращать штурвальное колесо с возрастающей скоростью.
После перекладки руля на за¬данный угол рулевой отпускает штурвальное колесо. Рулевая машина еще будет работать некоторый малый промежуток времени, рабочий вал вернет штурвальное колесо и пусковой золотник в среднее положение, и машина остановится.
У гидравлических рулевых машин роль сервомотора выполняют рычажные передачи.
Почти на всех морских судах рулевая машина удалена от поста управления ею и, поэтому применяются специальные телединамические передачи или телемоторы для связи поста управления с пусковым устройством рулевой машины.
Существуют валиковый, стержневой, тросовый, электрический и гидравлический телемоторы. Последние два имеют преимущественное применение.
Гидравлический телемотор приведен на рис. 75. Основу телемотора составляют датчик (рулевая тумба) и приемник. Датчик устанавливается на мостике, а приемник — в румпельном отделении и соединяются между собой трубопроводами. Предварительное заполнение системы телемотора маслом производится при помощи ручного насоса. Воздух при заполнении системы отводится через воздушную пробку крышки цилиндра датчика, а заполнение контролируется по переливу масла в бачок через сливной трубопровод.
Внутри датчика находится зубчатая рейка с закрепленным на ней поршнем. Рейка приводится в движение от рулевого штурвала через зубчатую цилиндрическую передачу. К цилиндру датчика прикреплен резервуар, связанный с рабочей полостью датчика при посредстве двух клапанов. Один клапан служит для перепуска масла из цилиндра датчика в резервуар в случае чрезмерного повышения давления в системе, другой — для перепуска масла из резервуара в цилиндр датчика при значительном понижении давления в системе.
Приемник состоит из двух неподвижных пустотелых скалок и подвижного цилиндра, разделенного перегородкой на две части. К цапфам цилиндра присоединены две тяги, связанные со штоком пускового золотника рулевой машины.
При вращении штурвала против часовой стрелки зубчатая рейка и поршень датчика будут двигаться вверх. Масло будет выдавливаться из верхней полости цилиндра датчика и поступать в нижнюю полость цилиндра приемника. Цилиндр будет двигаться вверх, сжимая пружину и выталкивая масло из верхней полости в нижнюю полость цилиндра датчика. Тяги выведут золотник из среднего положения, и рулевая машина начнет работать.
Если рулевой перестанет вращать штурвал и отпустит его, пружина начнет расширяться и заставит цилиндр приемника опускаться вниз. Ход масла в системе будет обратный, и цилиндр приемника и зубчатая рейка с поршнем датчика будут возвращены в среднее положение. Сервомотор остановит рулевую машину.
Вращением штурвала по часовой стрелке обеспечится перекладка руля на другой борт.
Для управления рулевой машиной широко применяются авторулевые, заменяющие рулевого и повышающие экономичность рулевого устройства за счет более точного управления рулевой машиной и уменьшения расхода энергии. Вдобавок, судно идет более устойчиво, меньше рыскает, что снижает расход топлива главным двигателем и сокращает время перехода судна.
Обслуживание рулевых устройств
При обслуживании рулевых устройств необходимо руководствоваться общими указаниями по обслуживанию палубных механизмов, а также указаниями ССХ и заводов-изготовителей.
Рулевое устройство должно быть в полной готовности к моменту выхода судна в рейс. Приготовление рулевой машины к действию производится по указанию вахтенного помощника капитана.
В процессе приготовления к действию паровой рулевой ма¬шины производится ее внешний осмотр, прогревается паропровод и машина, проверяется действие пускового золотника, серво¬мотора и клапана экономии. Все необходимые части смазы¬ваются. Телемотор заполняется рабочей жидкостью, если необхо¬димо, и проверяется плотность гидравлической системы по удер¬жанию давления масла.
У секторного или механического винтового привода обращается особое внимание на состояние шестерен, червяков и червячных колес. При сломанных или треснутых зубьях работа рулевого привода запрещается.
В электрогидравлической рулевой машине проверяется уровень масла в расширительном бачке, действие и переход с одного насоса на другой и с основного привода на запасной и обратно, плотность соединений и отсутствие пропусков рабочего масла из системы.
Действие рулевого устройства проверяется пробными пусками с контролированием согласованности действия всех узлов. Замеченные ненормальности в работе устраняются.
Вахтенный моторист или машинист обязан не менее двух раз за вахту проверять работу рулевой машины и смазывать трущиеся части на ходу судна. При этом также проверяется нагрев трущихся деталей на ощупь или по показаниям термометров и наличие шумов и стуков в рабочих частях рулевого устройства.
В гидравлических системах проверяется уровень масла в бачках, не допускается снижение уровня ниже метки на указательной шкале или колонке. При длительной работе рулевого устройства необходимо работать поочередно рулевыми машинами, если их две.
О всех замеченных ненормальностях в работе рулевого устройства необходимо немедленно докладывать вахтенному механику. В случае нагрева трущихся частей машины выше нормы выделяется самостоятельный вахтенный для наблюдения за рулевым устройством.
При кратковременной остановке рулевой машины закрывается стопорный клапан свежего пара и открываются краны продувания паровых цилиндров. При остановке машины на длительное время все паровые клапаны, за исключением кранов продувания, закрываются. Руль должен быть установленным в среднее положение.
Вывод электрической и электрогидравлической рулевой машины из действия производится отключением питания электродвигателя. Гидравлическая система должна быть проверена на плотность и на отсутствие течи рабочей жидкости из системы.
mirmarine.net
Электроусилитель руля — принцип работы, устройство, назначение
Электроусилитель рулевого управления, который известен под более простым названием как «Электроусилитель руля» — конструкторская особенность рулевого управление, где поворот руля облегчает электропривод. В настоящее время электроусилитель руля, все больше вытесняет гидроусилитель. Ряд его преимуществ в сравнении с гидроусилителем:
— можно регулировать характеристики рулевого управления с большим удобством;
— большая информативность;
— уменьшение расхода топлива (в среднем до 0,5 литров на 100 км пути).
Также, использование электроусилителя, позволило создать и использовать системы активной безопасности:
— система курсовой устойчивости;
— система автоматической парковки;
— система аварийного рулевого управления;
— система помощи движения по полосе.
Существует два варианта использования электроусилителя руля:
— усилия электродвигателя передается на вал рулевого колеса;
— усилие электродвигателя на рейку рулевого управления.
Самым востребованным считается вариант с усилием на рулевую рейку. Он более известен под названием: «электромеханический усилитель руля». У него существует также две известные конструкции:
— с двумя шестернями;
— с параллельным приводом.
Электроусилитель руля состоит из следующих устройств:
— электродвигатель;
— механическая передача;
— система управления.
Схема электроусилителя рулевого управления с двумя шестернями
В данной схеме электроусилитель руля объединен с рулевым механизмом в одном блоке. В конструкции электроусилителя используется асинхронный электродвигатель.
Механическая коробка передает крутящий момент электродвигателя к рейке рулевого механизма. В варианте с двумя шестернями, одна из них передает крутящий момент на рейку рулевого управления от рулевого колеса, другая шестерня — от электродвигателя усилителя. Именно для такого случая на рейке есть два участка зубьев, один из которых служит приводом для усилителя.
Схема электромеханического усилителя руля с параллельным приводом
В отличии от варианта с двумя шестернями, в варианте с параллельным приводом, для передачи усилия от электродвигателя на рейку используется специальный шариковый механизм и ременная передача.
Система управления включает в себя:
— входные датчики;
— электронный блок управления;
— исполнительное устройство.
Входные датчики представляют из себя: датчик угла поворота руля и датчик крутящего момента на рулевом колесе. Система управлением электроусилителем, использует и сторонние системы, такие как ABS (система недопущения блокировки всех колес при экстренном торможении) и блок управления двигателя (датчик частоты коленчатого вала).
Электронный блок управления
Блок управления считывает показатели с датчиков, далее он обрабатывает данные и в соответствии с алгоритмом своей работы, оказывает необходимое воздействие на исполнительное устройство — электродвигатель. Электродвигатель является главным исполнительным устройством, которое облегчает поворот руля благодаря усилию электродвигателя.
Сам электроусилитель может работать в нескольких режимах:
— обычные условия;
— малая скорость;
— большая скорость;
— активный возврат колес в среднее положение;
— поддержание среднего положения колес.
Поворот автомобиля естественно осуществляется поворотом рулевого колеса. Через торсион, крутящий момент рулевого колеса передается на рулевой механизм. Закрутку торсиона измеряет датчик крутящего момента, угол поворота руля — датчик угла поворота рулевого колеса. В дальнейшем все данные: угол поворота рулевого колеса, частота вращение коленчатого вала, скорость автомобиля, передаются блок управление, которые уже решает как дальше работать исполнительному устройству.
Получается, что поворот колес автомобиля происходит объединенными усилиями, которые передаются от рулевого колеса и электродвигателя усилителя.
При небольших скоростях руль становиться легким, обычно это при парковке, или сильно крутых поворотах. Электронная система обеспечивает максимальный крутящий момент электродвигателя, тем самым руль получает большие углы поворота. Максимальный крутящий момент электродвигателя обеспечивает значительное усиление рулевого управления.
При высоких скоростях на поворотах получится тяжелый руль, крутящий момент при этом наименьший. Но система управления может реактивное усилие, которое возникает при повороте колес — возврат колес в среднее положение.
Систему управления часто поддерживает среднее положение колес в условиях разного давления в шинах или допустим сильного бокового ветра и производит необходимую коррекцию. Также, в алгоритме блока управления предусмотрена компенсация увода переднеприводного автомобиля. А в активных системах безопасности электроусилитель действует самостоятельно.
mir-volkswagen.ru
Устройство электрических рулевых реек. | АвтобурУм
01.03.2018, Просмотров: 2404
Я уже рассказывал о системах электроусилителя руля Fiat http://autoburum.com/blog/181-remont-elektricheskogo-usilitela-rula-v-avtomobilah-fiat. На Фиате применяется электроусилитель рулевого управления, расположенный непосредственно на рулевой стойке. Здесь есть преимущество: система находится под «защитой» салона, то есть вся электрика, электроника, редуктор, привод расположены в салоне. Из недостатков: требует много свободного места в области рулевой стойки; повышенная нагрузка на рулевой редуктор. В последнее время получили распространение электроусилители руля, на которых привод с редуктором расположены непосредственно на рулевой рейке.
Недостатки и преимущества электрических реек
Основные недостатки:
- исполнительные механизмы расположены в подкапотном пространстве, где есть высокая вероятность попадания посторонних жидкостей и грязи;
- усложнение и без того капризной конструкции реек;
- электропроводка электроусилителя находится в крайне неприятных климатических условиях.
Преимущества такой конструкции:
- освобождение свободного места в области рулевой колонки, что увеличивает безопасность водителя при ДТП;
- вся кинематика усилителя рулевого управления сконцентрирована в одном месте – на рейке;
- уменьшение общей массы рулевого управления;
- возможность оперативного ремонта путем агрегатной замены.
Принцип работы
В среднем положении рулевого колеса датчики положения руля формируют нулевой сигнал на электронный блок управления электроусилителем. На приводы не поступает напряжение, рейка остается в нейтральном (нулевом) положении. При повороте руля в одном из направлений, датчики углового смещения формируют управляющий сигнал на блок управления, который вырабатывает управляющие токи на электропривод, который содействует перемещению колес в необходимом направлении. По окончании маневра блок управления возвращает механизм в исходное положение.
Конструктивно электрические рейки в настоящее время выполняются в следующих исполнениях:
- рейки с параллельным приводом;
- рейки с прямым приводом;
- электрорейки с дополнительной шестеренкой.
В соответствии с конструкцией электродвигатель привода может быть установлен непосредственно на рейке:

или устанавливаться на рейке в виде дополнительного механизма.

Электроника усилителя рулевого управления довольно сложная. При обработке информации о требуемом усилие поворота колес она использует сигналы многочисленных датчиков, которые не обязательно являются сенсорами электроусилителя руля, например:
- датчик скорости автомобиля;
- сенсор частоты вращения коленвала;
- датчики вращения колес.
Это необходимо, чтобы руль был более информативен. Одно дело, когда поворот колес происходит на скорости 5 км/час, другое – на скорости 100 км/час. На высокой скорости при отсутствии «обратной связи» рулевого управления даже незначительные угловые смещения колес могут привести к аварийной обстановке. Поэтому, неисправность системы электроусилителя руля, особенно, его электронной части чреваты серьезными последствиями.
Связь с датчиками других систем автомобиля, блоками управления организуется по CAN-шине. Неисправность CAN-шины является частой причиной отказа системы электроусилителя руля.
Производители территориально устанавливают блоки управления в разных местах. Например, азиаты предпочитают устанавливать блоки управления (электронику) подальше от электропривода рейки. В этом случае они руководствуются тем, что электроника в этом случае более защищена от загрязнения, пыли, воды, масел. Но есть и минусы:
- непосредственно к электроприводу идет достаточно мощная электропроводка;
- сигнальные провода датчиков могут быть повреждены, что приводит к однозначной потере неработоспособности.
Совсем наоборот поступают европейские производители, которые устанавливают блоки управления непосредственно на приводе, то есть на конструкции электрорейки. Думаю, что они полагаются на качество своих автодорог. С этой точки зрения я бы выбрал азиатский вариант. А вот с точки зрения ремонта, лучше европейская рейка, на которой все сконцентрировано в едином месте: снял рейку — и возись с ней.
Основные признаки и причины неисправности
Основными признаками неисправности электрических реек являются:
1. Заклинивание или приклинивание рейки. Такая неисправность обычно связана с повреждением пыльника. В таком случае в область зубьев попадает пыль, которая в смеси с влагой превращается в прекрасный абразив, который с каждой минутой движения (особенно в городском цикле) потихоньку «съедает» зубья. Через несколько тысяч километров пробега зубья стираются настолько, что результат виден без микроскопа. Выход из ситуации один: замена.


Ремонт блока управления электроусилителя ремня дело хлопотное. Если слетела прошивка, то найти ее практически невозможно, разве что, у профессионалов своего дела.
Адаптация электрорейки
После ремонта или обслуживания электрической рейки ее необходимо вновь адаптировать, иначе руль и рейка будут работать с угловым смещением, да и сигнал об ошибке на приборной панели не удалится. Сделать это можно только при помощи диагностического оборудования, путем манипуляций с поворотом руля в крайние положения в соответствии с инструкциями, которые дает диагностический сканер.
Общие рекомендации
- Регулярно проверяйте состояние пыльников рейки.
- При появлении сообщения об ошибке электроусилителя немедленно приступайте к устранению неисправности.
- По возможности, реже поворачивайте руль в крайние положения.
- Не оставляйте на длительную стоянку автомобиль с вывернутыми колесами.

autoburum.com
Датчики электрического усилителя рулевого управления
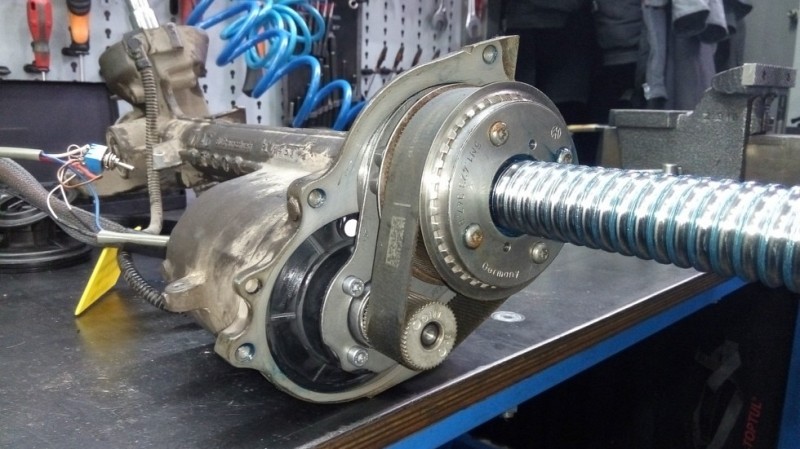
Как правило, в современных легковых автомобилях все чаще применяют электрический усилитель рулевого управления. В интернете и специализированной литературе довольно подробно написано, для чего он нужен и как устроен. Для автолюбителя и работника автосервиса (любящего свою работу) уровень такого предоставленного материала иногда вполне достаточен.Но для инженера или разработчика, к сожалению, он довольно скуден и поверхностен, а иногда и не совсем точен. На примере одной конструкции, весьма уважаемого производителя, попробую изложить дополнительную информацию, которую я получил при разборке данного устройства. Касается это в основном датчиков, определяющих работу данного устройства, и пример реализации их подключения. Возможно, это будет полезно, хотя бы студентам и инженерам. Для людей, профессионально занимающимся разработкой автомобилей это изложение покажется, наверное, смешным.
Итак, есть такой узел, один вал (назовем выходной) которого управляет углом поворота передних колес, а к другому противоположному валу (назовем входной вал) прикреплен руль. К рулю (рулевому колесу) прилагает усилие тело своими руками, (стандартным весом по ГОСТу 75кг, имеющее право на управление автомобилем, и совершающее обдуманные законопослушные действия) в надежде изменить угол поворота колес. При этом на каждое это колесо приходится часть веса автомобиля, и довольно таки существенное (300 — 600 кг), и при диаметре рулевого колеса, не превышающем полметра, усилие, которое надо прилагать к рулю, на неподвижном автомобиле, без дополнительного усилителя, очень чрезмерно для большинства, по мнению медиков, здоровых людей.
Для облегчения усилия, требуемого прилагать к рулевому колесу, ставят электромотор, который прилагает дополнительное усилие к выходному валу. Какое дополнительное усилие, и в какую сторону надо прилагать электромотору, определят электронный блок усилителя рулевого управления, с помощью датчика усилия, которое прилагает водитель к рулевому колесу. Датчик этот расположен, как правило, в месте соединения выходного и входного вала. А соединяются эти валы между собой с помощью гибкого элемента (как правило, торсиона, параметры которого имеют заданные значения), который гибко деформируется (закручивается) в ту или иную сторону, на угол, пропорционально по степени прилагаемого усилия между рулевым колесом, и силой сопротивления передних колес автомобиля их повороту. Электромотор применяют, как правило, теперь бес коллекторный, трехфазный. Для управления вращением электромотором требуется схема, формирующая из постоянного тока бортовой сети переменное напряжение из трех фаз. Контролировать правильное вращение электромотора, помогает еще один датчик – датчик вращения и угла поворота его оси. Сигналы с этих датчиков, и поступают электронный блок усилителя рулевого управления. Внутри которого также находится схема управления электромотором. Сам это блок связан внутренней сетью управления с другими электронными блоками автомобиля.
Электронная начинка этого блока содержит довольно таки производительный микроконтроллер (примерно уровня STM32F4xx и даже выше), контроллер управления трехфазным мотором, цепи предотвращения работы и отключения электрических цепей при возникновении нештатной работы или внутренней неисправности.
Наверное, вы уже устали читать, приступим к разборке (фотографии простые, извиняюсь за качество). Я буду применять иногда свои выдуманные названия к предметам, извините и поправьте если что.
Датчик усилия (далее ДУ), представляет собой систему из:
— Кольцевого многополюсного магнита (далее КМ), напрессованного на входной вал.
— Кольцевого селектора (далее КС) магнитного поля, напрессованного на выходной вал. Он состоит и пластикового цилиндрического корпуса, с двумя магнитопроводящими кольцами, которые имеют клювообразные элементы, на стороне, обращенной к КМ. Эти клювообразные элементы соответствуют количеству и положению магнитных полюсов на КМ.
— Датчика магнитного поля (далее ДМ), закрепленного уже на неподвижном корпусе усилителя рулевого управления, и состоящего из двух магнитопроводящих полуколец, передающих магнитное поле от КС к двум датчикам холла.
Начну иллюстрации:
Так выглядят еще не разъединённые входной и выходной вал:
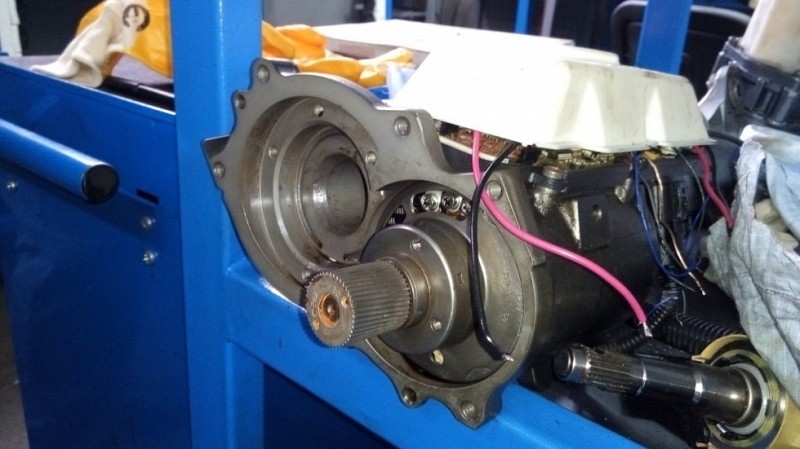
Вынимаем шпильку и разъединяем: (Кольцевой трансформатор=кольцевой селектор)
Дальше:
Напрессованный КС, КМ, видны пазы входного и выходного вала, ограничивающие угол закручивания торсиона, и даже если он сломается, рулевое управление будет сохранено. Задача торсиона, не передавать весь крутящий момент, а только его измерить:
Слева — корпус ДМ, справа — КС.
Датчики холла (их два, тип мне неизвестен):
А так весь механизм выложен последовательно, все снято со своих мест:
Как возможно это работает:
В собранной конструкции, пока нет деформации торсиона, Полюса КМ расположены напротив клювообразных отводов двух магнитопроводящих колец КС в определенном положении. Наводимые магнитные поля через двух кольцевой приемник ДМ подводится к своему соответствующему датчику холла. И в этом состоянии магнитные поля, приводимые к датчикам холла одинаковы.
При деформации торсиона, вследствие приложения усилия к рулевому колесу, положение КМ относительно клювообразных отводов КС меняется, и на двух магнитопроводящих кольцах КС создается разность магнитного поля. Которое подводится с помощью двух колец ДМ к датчикам холла. С двух датчиков холла, с их выходов, получается дифференциальное напряжение, прямо пропорциональное деформации торсиона, и соответственно, усилию на рулевом колесе. Но иногда может потребоваться калибровка показаний датчиков, что предусмотрено.
Что можно увидеть на экране осциллографа?
КМ и КС расположены без смещения относительно друг друга:
Сигналы на выходах датчиков одинаковы:
Смещение в КМ относительно КС одну сторону:
Сигнал (один увеличивается, другой на столько же уменьшается):
Смещение в другу сторону:
Сигнал:
Плавно совмещаем КМ и КС:
В идеале, сигнал на выходе датчиков должен иметь такую характеристику:
Чрезмерно деформировать торсион, сломать его, не дают соответствующие пазы входного и выходного вала, находящиеся в определенном взаимном положении.
Иногда, “разводят”, или неправильно ставят диагноз некоторые «спецы», резко вращая рулевое колесо из стороны в сторону, на заглушенном автомобиле. При этом из рулевой колонки доносится отчетливый стук, который пытаются выдать за проявление неисправности. А на самом деле звук этот и издают пазы при соударении, так как компенсировать деформацию торсиона при неработающем двигателе некому (не работает двигатель – зачем тебе и электроусилитель руля). В “гаражах” иногда работают вполне грамотные и опытные люди, но чек и квитанция это дополнительный страховой полис, мало ли. Не экономьте на правильном диагнозе. То же самое происходит и в работе золотника (гидравлического распределителя) гидравлического усилителя руля.
Электромотор, три фазы, магнитный ротор имеет четыре полюса:
Выходной вал электромотора, проходит через датчик вращения:
Датчик вращения электромотора приподнят, видно эксцентрик на валу (часть вращающегося трансформатора):
Датчик вращения и положения оси электродвигателя усилителя рулевого управления,
называют его еще вращающимся трансформатором (далее ВТ), или ресольвером. В том месте, где расположен этот датчик, на оси электромотора имеется эксцентрик. Который при вращении, меняет расположение магнитного поля между полюсами трансформатора. Как взаимно расположены обмотки на полюсах, смотрите на рисунке далее (не указал фазировку, простите).
В данном случае, ВТ имеет три обмотки, на одну подается опорное синусоидальное напряжение, а с двух других снимается синусоидальное напряжение, пропорциональное углу поворота оси электромотора. Для примера, подаем напряжение синусоидальной формы на обмотку “возбуждения” со звуковой карты компьютера, а с двух других обмоток будем снимать показания осциллографом. Эксцентриком будет служить простой металлический винт. Думаю картинки красноречивы и комментировать каждую не имеет смысла. Но рассматривая экран осциллографа, надо проявлять немного фантазии, ибо смотрим два канала, а синхронизация только по одному. Иногда один луч кажется двоится.
С разобранным корпусом для наглядности;
Подаем сигнал:
При отсутствии эксцентрика внутри ВТ
на выходе нет сигналов:
Вставляем имитатор эксцентрика и начинаем его крутить, и смотрим сигналы:
Не стал заморачиваться с анимацией, думаю и так понятно. Имея два таких сигнала, измеряя их амплитуду и фазу, можно с достаточной точностью и надежностью определять положение оси электродвигателя. Ну и для завершения, так примерно организованы входные и выходные цепи электронного блока усилителя руля (тестер и мои личные фантазии):
Все сигналы поступают для обработки в микроконтроллер на аналоговые входы. Выход TSY — напряжение питания датчиков холла. Магнитные датчики не так склонны к запотеванию и наличию грязи, как оптические, терпимы к высоким и низким температурам.
Но и лепить где попало неодимовые магниты в машине и дома, тоже не стоит. К тому же они могут привести к вреду здоровья при неправильном использовании.
Надеюсь не утомил.
С уважением, Астанин Сергей.
Готов к вопросам и комментариям тут.
Будем продолжать в таком духе и разбирать автоматические коробки передач и вариаторы тут :)?
we.easyelectronics.ru
2.2.4. Схемы управления рулевыми электроприводами
В зависимости от системы рулевого электропривода, назначения судна, рода тока на судне, требований надежности и живучести могут применяться различные схемы управления рулевыми электроприводами.
Область применения различных схем управления электроприводов в значительной степени определяется мощностью электродвигателя.
Управление рулевым гидравлическим приводом в системе автоматического действия может быть осуществлено теми же схемами авторулевых, что и для механических приводов с воздействием на манипулятор гидравлического насоса.
К схемам рулевых электроприводов предъявляется ряд требований, определяемых главным образом Правилами Регистра и Международной конвенцией.
Питание рулевого электропривода на судах должно осуществляться непосредственно от ГРЩ по двум максимально удаленным друг от друга (обычно они находятся на противоположных бортах) фидерам. Если рулевой электропривод имеет два комплекта двигателей, то каждый питается от своего фидера. На судах, имеющих аварийную электростанцию, электрически связанную с главным распределительным щитом судна, Правилами рекомендуется подключать один из фидеров через аварийную электростанцию, предусмотрев достаточную ее мощность.
Управление пуском приводных двигателей для рулевого преобразователя или насоса переменной производительности (при установке вне машинного отделения) осуществляется дистанционно: у места нахождения двигателя, в рулевой рубке и на главном распределительном щите (если у последнего ведется круглосуточная вахта).
Управление электроприводом руля осуществляется от двух (не менее) постов управления и переключателей постов управления. Переключатель должен подключать только один пост из имеющихся. Резервный пост устанавливается либо в румпельном помещении, либо на юте.
В электрических схемах рулевых приводов Правилами запрещается иметь максимальную и нулевую выключающие привод защиты. Должна быть только защита от коротких замыканий и соответствующая сигнализация. В схемах должны предусматриваться конечные выключатели, ограничивающие предельный по углу ход привода, но допускающие его обратный ход. В следящих автоматических системах ограничение не обязательно.
На рис. 2.2. приведена одна из схем электропривода переменного тока основных насосов гидравлических рулевых машин (для одной машины).
Питание электропривода осуществляется по двум фидерам, разведенным по бортам. При выходе из строя основного фидера от ГРЩ в работу автоматически включается резервный (от АРЩ). Эту операцию выполняет автоматический переключатель питания, выполненный на контакторах КМ1 и КМ2 с электронной блокировкой.
При включении автоматического выключателя QF1 питание подается на схему управления. Пуск двигателя можно осуществлять как из румпельного помещения, так и с поста дистанционного управления. В первом случае переключатель SA переводится в положение М (местное), во втором в положение Д (дистанционное) и включение двигателя насоса производится контактором КДВ (дистанционного включения). Как в первом, так и во втором случае срабатывает контактор КМ3 и двигатель получает питание от сети.
|
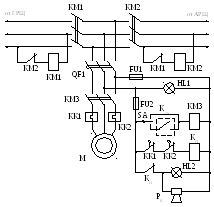
Рис. 2.2. Схема электрогидравлического рулевого привода
Защиту электропривода от коротких замыканий осуществляет автоматический выключатель QF1, а во вспомогательных цепях предохранители FU1 и FU2. Для контроля возможных перегрузок электропривода использованы тепловые реле КК1, КК2, работающие на промежуточное реле КП, которое своим нормально-замкнутым контактом включает световую лампу HL2 и звуковую сигнализацию – ревун РВ. Сигнализацию о подаче питания в схему управления обеспечивает лампа HL1.
studfile.net