Синхронный электродвигатель: характеристики, устройство и принцип действия
Синхронный электродвигатель – это устройство, преобразующее электрическую энергию в механическую. Его также можно использовать в качестве генератора. Чаще всего он применяется в компрессорах, прокатных станках, поршневых насосах и другом подобном оборудовании. Рассмотрим принцип действия синхронного электродвигателя, его характеристики и свойства.
Устройство синхронного электродвигателя
Строение агрегата данного вида типично. Двигатель состоит из:
- Неподвижной части (якорь или статор).
- Подвижной части (ротор или индуктор).
- Вентилятора.
- Контактных колец.
- Щеток.
- Возбудителя.
Статор представляет собой сердечник, состоящий из обмоток, который заключен в корпус. Индуктор комплектуется электромагнитами постоянного тока (полюсами). Конструкция индуктора может быть двух видов – явнополюсная и неявнополюсная. В статоре и роторе расположены ферромагнитные сердечники, изготовленные из специальной электротехнической стали. Они необходимы для уменьшения магнитного сопротивления и улучшения прохождения магнитного потока.
Частота вращения ротора в синхронном двигателе равна частоте вращения магнитного поля. Независимо от подключаемой нагрузки частота ротора неизменна, так как число пар полюсов магнитного поля и ротора совпадают. Их взаимодействие обеспечивает постоянную угловую скорость, не зависящую от момента, приложенного к валу.
Принцип работы синхронного электродвигателя
Самые распространенные типы такого рода агрегатов – однофазный и трехфазный. Принцип работы синхронного электродвигателя в обоих случаях примерно одинаков. После подключения обмотки якоря к сети ротор остается неподвижным, в то время как постоянный ток поступает в обмотку возбуждения. Направление электромагнитного момента меняется дважды за время одного изменения напряжения. При значении среднего момента равном нулю, ротор под влиянием внешнего момента (механического воздействия) разгоняется до частоты, близкой по значению частоте вращения магнитного поля в зазоре, после чего двигатель переходит в синхронный режим.
В трехфазном устройстве проводники расположены под определенным углом относительно друг друга. В них возбуждается вращающееся с синхронной скоростью электромагнитное поле.
Разгон двигателя может осуществляться в двух режимах:
- Асинхронный. Обмотки индуктора замыкаются с помощью реостата. Вращающееся магнитное поле, возникающее при включении напряжения, пересекает короткозамкнутую обмотку, установленную на роторе. В ней индуцируются токи, взаимодействующие с вращающимся полем статора. По достижении синхронной скорости крутящий момент начинает уменьшаться и сводится к нулю после замыкания магнитного поля.
- С помощью вспомогательного двигателя. Для этого синхронный двигатель механически соединяется со вспомогательным (двигателем постоянного тока либо трехфазным индукционным двигателем). Постоянный ток подается только после того, как вращение двигателя достигает скорости, близкой к синхронной. Магнитное поле замыкается, и связь со вспомогательным двигателем прекращается.
Характеристики синхронного электродвигателя
Хотя асинхронные двигатели считаются более надежными и дешевыми, их синхронные «собратья» имеют некоторые преимущества и широко применяются в различных областях промышленности. К отличительным характеристикам синхронного электродвигателя можно отнести:
- Работу при высоком значении коэффициента мощности.
- Высокий КПД по сравнению с асинхронным устройством той же мощности.
- Сохранение нагрузочной способности даже при снижении напряжения в сети.
- Неизменность частоты вращения независимо от механической нагрузки на валу.
- Экономичность.
Синхронным двигателям также присущи некоторые недостатки:
- Достаточно сложная конструкция, делающая их производство дороже.
- Необходимость источника постоянного тока (возбудителя или выпрямителя).
- Сложность пуска.
- Необходимость корректировать угловую частоту вращения путем изменения частоты питающего напряжения.
Однако в некоторых случаях использование синхронных двигателей предпочтительнее:
- Для улучшения коэффициента мощности.
- В длительных технологических процессах, где нет необходимости в частых запусках и остановках.
Таким образом, «плюсы» двигателей такого типа значительно превосходят «минусы», поэтому на данный момент они высоко востребованы.
Изучив синхронный двигатель, устройство и принцип его действия и учтя условия, в которых он будет эксплуатироваться, вы сможете быстро и с легкостью подобрать оптимально подходящий для ваших целей тип агрегата (защищенный, закрытый, открытый) и использовать его с максимальной эффективностью.
Механические характеристики электродвигателей
Правильный выбор электродвигателя для производственного механизма – залог его нормальной и экономичной работы. Если электродвигатель подобран правильно, это упростит систему управления электроприводом и возможно удешевит стоимость электропривода. Как известно электропривод должен обеспечивать не только постоянство установившихся значений (скорость, момент), но и динамических (переходных процессов, таких как ускорение, тормозной момент, пусковой момент и т.д.).
Основным критерием для подбора электродвигателей используют зависимость, на которой отображают значение момента М электродвигателя и скорости вращения вала n при действии этого момента. Такая зависимость имеет название механическая характеристика n=f(M). По механическим характеристикам производят анализ электромеханических свойств двигателя, а также оценивают целесообразность применения его для различного рода механизмов и устройств. Они могут быть двух видов: естественные и искусственные.
Естественные механические характеристики: они снимаются при влиянии на двигатель номинальных параметров (номинальный ток, сопротивление обмоток, напряжение, момент сопротивления и т.д.). То есть двигатель подключается к источнику питания без каких-либо преобразовательных устройств – прямым включением.

Искусственные механические характеристики: их снимают при введении в цепь двигателя дополнительных элементов (резистор добавочный) или при пониженном напряжении питания, частоте (если двигатель переменного напряжения) и т.д. То есть на механическую характеристику двигателя производят искусственное влияние.

Также различают механические характеристики по изменению скорости вращения вала в зависимости от увеличения момента. Они оцениваются по жесткости:

и крутизне наклона:

Чтоб определить жесткость механической характеристики необходимо знать изменение скорости и момента на заданном участке зависимости n=f(M). Соответственно все расчеты жесткости ведутся либо в процентах, либо в относительных единицах.
Также механические характеристики можно отсортировать по группам:
- Абсолютно жесткая – при изменении момента нагрузки, скорость вращения вала остается неизменной. Как пример – характеристика синхронной машины.


- Жесткая – когда скорость уменьшается немного при увеличении момента нагрузки. Как пример, двигатели постоянного тока независимого возбуждения ДПТ НВ или линейная часть характеристики асинхронного двигателя.
- Мягкая – при увеличении момента нагрузки изменения в скорости вращения довольно существенные. К таким относят двигатели постоянного тока последовательного возбуждения ДПТ ПВ.
Ниже приведен график различных механических характеристик электродвигателей:

- – это абсолютно жесткая синхронной машины
- – жесткая ДПТ НВ
- — мягкая ДПТ ПВ
- – мягкая ДПТ смешанного возбуждения
- – асинхронного двигателя
Подбор электродвигателя определяется требованиями производственных механизмов. В таком производстве как прокатка металла, изготовление бумаги или картона, требуется четкое поддержание постоянства скорости, а такие механизмы, как подъемные и транспортные, не требуют жестких характеристик (в тяговых электроприводах используется ДПТ ПВ, также он применяется в некоторых крановых механизмах).
elenergi.ru
устройство, принцип работы, типы, управление
Эра электродвигателей берёт своё начало с 30-х годов XIX века, когда Фарадей на опытах доказал способность вращения проводника, по которому проходит ток, вокруг постоянного магнита. На этом принципе Томасом Девенпортом был сконструирован и испытан первый электродвигатель постоянного тока. Изобретатель установил своё устройство на действующую модель поезда, доказав тем самым работоспособность электромотора.
Практическое применение ДПТ нашёл Б. С. Якоби, установив его на лодке для вращения лопастей. Источником тока учёному послужили 320 гальванических элементов. Несмотря на громоздкость оборудования, лодка могла плыть против течения, транспортируя 12 пассажиров на борту.
Лишь в конце XIX столетия синхронными электродвигателями начали оснащать промышленные машины. Этому способствовало осознание принципа преобразования электродвигателем постоянного тока механической энергии в электричество. То есть, используя электродвигатель в режиме генератора, удалось получать электроэнергию, производство которой оказалось существенно дешевле от затрат на выпуск гальванических элементов. С тех пор электродвигатели совершенствовались и стали завоёвывать прочные позиции во всех сферах нашей жизнедеятельности.
Устройство и описание ДПТ
Конструктивно электродвигатель постоянного тока устроен по принципу взаимодействия магнитных полей.
Самый простой ДПТ состоит из следующих основных узлов:
- Двух обмоток с сердечниками, соединенных последовательно. Данная конструкция расположена на валу и образует узел, называемый ротором или якорем.
- Двух постоянных магнитов, повёрнутых разными полюсами к обмоткам. Они выполняют задачу неподвижного статора.
- Коллектора – двух полукруглых, изолированных пластин, расположенных на валу ДПТ.
- Двух неподвижных контактных элементов (щёток), предназначенных для передачи электротока через коллектор до обмоток возбуждения.
 Рисунок 1. Схематическое изображение простейшего электродвигателя постоянного тока.
Рисунок 1. Схематическое изображение простейшего электродвигателя постоянного тока.Рассмотренный выше пример – это скорее рабочая модель коллекторного электродвигателя. На практике такие устройства не применяются. Дело в том, что у такого моторчика слишком маленькая мощность. Он работает рывками, особенно при подключении механической нагрузки.
Статор (индуктор)
В моделях мощных современных двигателях постоянного тока используются статоры, они же индукторы, в виде катушек, намотанных на сердечники. При замыкании электрической цепи происходит образование линий магнитного поля, под действием возникающей электромагнитной индукции.
Для запитывания обмоток индуктора ДПТ могут использоваться различные схемы подключения:
- с независимым возбуждением обмоток;
- соединение параллельно обмоткам якоря;
- варианты с последовательным возбуждением катушек ротора и статора;
- смешанное подсоединение.
Схемы подключения наглядно видно на рисунке 2.
 Рисунок 2. Схемы подключения обмоток статора ДПТ
Рисунок 2. Схемы подключения обмоток статора ДПТУ каждого способа есть свои преимущества и недостатки. Часто способ подключения диктуется условиями, в которых предстоит эксплуатация электродвигателя постоянного тока. В частности, если требуется уменьшить искрения коллектора, то применяют параллельное соединение. Для увеличения крутящего момента лучше использовать схемы с последовательным подключением обмоток. Наличие высоких пусковых токов создаёт повышенную электрическую мощность в момент запуска мотора. Данный способ подходит для двигателя постоянного тока, интенсивно работающего в кратковременном режиме, например для стартера. В таком режиме работы детали электродвигателя не успевают перегреться, поэтому износ их незначителен.
Ротор (якорь)
В рассмотренном выше примере примитивного электромотора ротор состоит из двухзубцового якоря на одной обмотке, с чётко выраженными полюсами. Конструкция обеспечивает вращение вала электромотора.
В описанном устройстве есть существенный недостаток: при остановке вращения якоря, его обмотки занимают устойчивое. Для повторного запуска электродвигателя требуется сообщить валу некий крутящий момент.
Этого серьёзного недостатка лишён якорь с тремя и большим количеством обмоток. На рисунке 3 показано изображение трёхобмоточного ротора, а на рис. 4 – якорь с большим количеством обмоток.
 Рисунок 3. Ротор с тремя обмотками
Рисунок 3. Ротор с тремя обмотками Рисунок 4. Якорь со многими обмотками
Рисунок 4. Якорь со многими обмоткамиПодобные роторы довольно часто встречаются в небольших маломощных электродвигателях.
Для построения мощных тяговых электродвигателей и с целью повышения стабильности частоты вращения используют якоря с большим количеством обмоток. Схема такого двигателя показана на рисунке 5.
 Рисунок 5. Схема электромотора с многообмоточным якорем
Рисунок 5. Схема электромотора с многообмоточным якоремКоллектор
Если на выводы обмоток ротора подключить источник постоянного тока, якорь сделает пол-оборота и остановится. Для продолжения процесса вращения необходимо поменять полярность подводимого тока. Устройство, выполняющее функции переключения тока с целью изменения полярности на выводах обмоток, называется коллектором.
Самый простой коллектор состоит из двух, изолированных полукруглых пластин. Каждая из них в определённый момент контактирует со щёткой, с которой снимается напряжение. Одна ламель всегда подсоединена к плюсу, а вторая – к минусу. При повороте вала на 180º пластины коллектора меняются местами, вследствие чего происходит новая коммутация со сменой полярности.
Такой же принцип коммутации питания обмоток используются во всех коллекторах, в т. ч. и в устройствах с большим количеством ламелей (по паре на каждую обмотку). Таким образом, коллектор обеспечивает коммутацию, необходимую для непрерывного вращения ротора.
В современных конструкциях коллектора ламели расположены по кругу таким образом, что каждая пластина соответствующей пары находится на диаметрально противоположной стороне. Цепь якоря коммутируется в результате изменения положения вала.
Принцип работы
Ещё со школьной скамьи мы помним, что на провод под напряжением, расположенный между полюсами магнита, действует выталкивающая сила. Происходит это потому, что вокруг проволоки образуется магнитное поле по всей его длине. В результате взаимодействия магнитных полей возникает результирующая «Амперова» сила:
F=B×I×L, где B означает величину магнитной индукции поля, I – сила тока, L – длина провода.
Вектор «Амперовой» всегда перпендикулярен до линий магнитных потоков между полюсами. Схематически принцип работы изображён на рис. 6.
 Рис. 6. Принцип работы ДПТ
Рис. 6. Принцип работы ДПТЕсли вместо прямого проводника возьмём контурную рамку и подсоединим её к источнику тока, то она повернётся на 180º и остановится в в таком положении, в котором результирующая сила окажется равной 0. Попробуем подтолкнуть рамку. Она возвращается в исходное положение.
Поменяем полярность тока и повторим попытку: рамка сделала ещё пол-оборота. Логично припустить, что необходимо менять направление тока каждый раз, когда соответствующие витки обмоток проходят точки смены полюсов магнитов. Именно для этой цели и создан коллектор.
Схематически можно представить себе каждую якорную обмотку в виде отдельной контурной рамки. Если обмоток несколько, то в каждый момент времени одна из них подходит к магниту статора и оказывается под действием выталкивающей силы. Таким образом, поддерживается непрерывное вращение якоря.
Типы ДПТ
Существующие электродвигатели постоянного тока можно классифицировать по двум основным признакам: по наличию или отсутствию в конструкции мотора щеточно-коллекторного узла и по типу магнитной системы статора.
Рассмотрим основные отличия.
По наличию щеточно-коллекторного узла
Двигатели постоянного тока для коммутации обмоток, которых используются щёточно-коллекторные узлы, называются коллекторными. Они охватывают большой спектр линейки моделей электромоторов. Существуют двигатели, в конструкции которых применяется до 8 щёточно-коллекторных узлов.
Функции ротора может выполнять постоянный магнит, а ток от электрической сети подаётся непосредственно на обмотки статора. В таком варианте отпадает надобность в коллекторе, а проблемы, связанные с коммутацией, решаются с помощью электроники.
В таких бесколлекторных двигателях устранён один из недостатков –искрение, приводящее к интенсивному износу пластин коллектора и щёток. Кроме того, они проще в обслуживании и сохраняют все полезные характеристики ДПТ: простота в управлении связанном с регулировкой оборотов, высокие показатели КПД и другие. Бесколлекторные моторы носят название вентильных электродвигателей.
По виду конструкции магнитной системы статора
В конструкциях синхронных двигателей существуют модели с постоянными магнитами и ДПТ с обмотками возбуждения. Электродвигатели серий, в которых применяются статоры с потоком возбуждения от обмоток, довольно распространены. Они обеспечивают стабильную скорость вращения валов, высокую номинальную механическую мощность.
О способах подключения статорных обмоток шла речь выше. Ещё раз подчеркнём, что от выбора схемы подключения зависят электрические и тяговые характеристики двигателей постоянного тока. Они разные в последовательных обмотках и в катушках с параллельным возбуждением.
Управление
Не трудно понять, что если изменить полярность напряжения, то направление вращения якоря также изменится. Это позволяет легко управлять электромотором, манипулируя полярностью щеток.
Механическая характеристика
Рассмотрим график зависимости частоты от момента силы на валу. Мы видим прямую с отрицательным наклоном. Эта прямая выражает механическую характеристику электродвигателя постоянного тока. Для её построения выбирают определённое фиксированное напряжение, подведённое для питания обмоток ротора.
 Примеры механических характеристик ДПТ независимого возбуждения
Примеры механических характеристик ДПТ независимого возбужденияРегулировочная характеристика
Такая же прямая, но идущая с положительным наклоном, является графиком зависимости частоты вращения якоря от напряжения питания. Это и есть регулировочная характеристика синхронного двигателя.
Построение указанного графика осуществляется при определённом моменте развиваемом ДПТ.
 Пример регулировочных характеристик двигателя с якорным управлением
Пример регулировочных характеристик двигателя с якорным управлениемБлагодаря линейности характеристик упрощается управление электродвигателями постоянного тока. Поскольку сила F пропорциональна току, то изменяя его величину, например переменным сопротивлением, можно регулировать параметры работы электродвигателя.
Регулирование частоты вращения ротора легко осуществляется путём изменения напряжения. В коллекторных двигателях с помощью пусковых реостатов добиваются плавности увеличения оборотов, что особенно важно для тяговых двигателей. Это также один из эффективных способов торможения. Мало того, в режиме торможения синхронный электродвигатель вырабатывает электрическую энергию, которую можно возвращать в энергосеть.
Области применения
Перечислять все области применения электродвигателей можно бесконечно долго. Для примера назовём лишь несколько из них:
- бытовые и промышленные электроинструменты;
- автомобилестроение – стеклоподъёмники, вентиляторы и другая автоматика;
- трамваи, троллейбусы, электрокары, подъёмные краны и другие механизмы, для которых важны высокие параметры тяговых характеристик.
Преимущества и недостатки
К достоинствам относится:
- Линейная зависимость характеристик электродвигателей постоянного тока (прямые линии) упрощающие управление;
- Легко регулируемая частота вращения;
- хорошие пусковые характеристики;
- компактные размеры.
У асинхронных электродвигателей, являющихся двигателями переменного тока очень трудно достичь таких характеристик.
Недостатки:
- ограниченный ресурс коллектора и щёток;
- дополнительная трата времени на профилактическое обслуживание, связанное с поддержанием коллекторно-щёточных узлов;
- ввиду того, что мы пользуемся сетями с переменным напряжением, возникает необходимость выпрямления тока;
- дороговизна в изготовлении якорей.
По перечисленным параметрам из недостатков в выигрыше оказываются модели асинхронных двигателей. Однако во многих случаях применение электродвигателя постоянного тока является единственно возможным вариантом, не требующим усложнения электрической схемы.
Видео в дополнение к написанному
www.asutpp.ru
38.Механическая характеристика асинхронного двигателя
38) Механическая характеристика асинхронного двигателя.
Механическая характеристика. Зависимость частоты вращения ротора от нагрузки (вращающегося момента на валу) называется механической характеристикой асинхронного двигателя (рис. 262, а). При номинальной нагрузке частота вращения для различных двигателей обычно составляет 98—92,5 % частоты вращения n1 (скольжение sном = 2 – 7,5 %). Чем больше нагрузка, т. е. вращающий момент, который должен развивать двигатель, тем меньше частота вращения ротора. Как показывает кривая
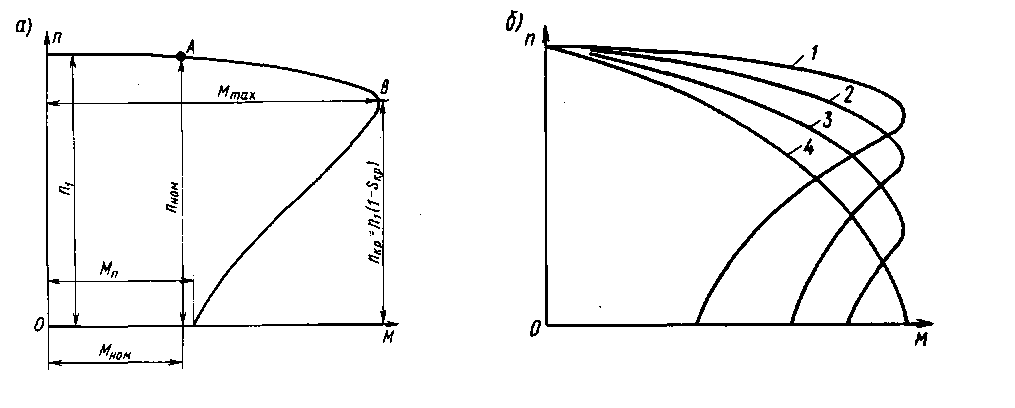
Рис. 262. Механические характеристики асинхронного двигателя: а — естественная; б — при включении пускового реостата
на рис. 262, а, частота вращения асинхронного двигателя лишь незначительно снижается при увеличении нагрузки в диапазоне от нуля до наибольшего ее значения. Поэтому говорят, что такой двигатель обладает жесткой механической характеристикой.
Наибольший вращающий момент Mmax двигатель развивает при некоторое скольжении skp, составляющем 10—20%. Отношение Mmax/Mном определяет перегрузочную способность двигателя, а отношение Мп/Мном — его пусковые свойства.
Двигатель может устойчиво работать только при обеспечении саморегулирования, т. е. автоматическом установлении равновесия между приложенным к валу моментом нагрузки Мвн и моментом М, развиваемым двигателем. Этому условию соответствует верхняя часть характеристики до достижения Mmax (до точки В). Если нагрузочный момент Мвн превысит момент Mmax, то двигатель теряет устойчивость и останавливается, при этом по обмоткам машины будет длительно проходить ток в 5—7 раз больше номинального, и они могут сгореть.
При включении в цепь обмоток ротора пускового реостата получаем семейство механических характеристик (рис. 262,б). Характеристика 1 при работе двигателя без пускового реостата называется естественной. Характеристики 2, 3 и 4, получаемые при подключении к обмотке ротора двигателя реостата с сопротивлениями R1п (кривая 2), R2п (кривая 3) и R3п (кривая 4), называют реостатными механическими характеристиками. При включении пускового реостата механическая характеристика становится более мягкой (более крутопадающей), так как увеличивается активное сопротивление цепи ротора R2 и возрастает sкp. При этом уменьшается пусковой ток. Пусковой момент Мп также зависит от R2. Можно так подобрать сопротивление реостата, чтобы пусковой момент Мп был равен наибольшему Мmax.
В двигателе с повышенным пусковым моментом естественная механическая характеристика приближается по своей форме к характеристике двигателя с включенным пусковым реостатом. Вращающий момент двигателя с двойной беличьей клеткой равен сумме двух моментов, создаваемых рабочей и пусковой клетками. Поэтому характеристику 1 (рис. 263) можно получить путем суммирования характеристик 2 и 3, создаваемых этими клетками. Пусковой момент Мп такого двигателя значительно больше, чем момент М’п обычного короткозамкнутого двигателя. Механическая характеристика двигателя с глубокими пазами такая же, как и у двигателя с двойной беличьей клеткой.
НА ВСЯКИЙ СЛУЧАЙ РАБОЧУЮ ХАРАКТЕРИСТИКУ !!!
Рабочие характеристики. Рабочими характеристиками асинхронного двигателя называются зависимости частоты вращения n (или скольжения s), момента на валу М2, тока статора I1 коэффициента полезного действия ? и cos?1, от полезной мощности Р2 = Рmx при номинальных значениях напряжения U1 и частоты f1 (рис. 264). Они строятся только для зоны практической устойчивой работы двигателя, т. е. от скольжения, равного нулю, до скольжения, превышающего номинальное на 10—20%. Частота вращения n с ростом отдаваемой мощности Р2 изменяется мало, так же как и в механической характеристике; вращающий момент на валу М2 пропорционален мощности Р2, он меньше электромагнитного момента М на значение тормозящего момента Мтр, создаваемого силами трения.
Ток статора I1, возрастает с увеличением отдаваемой мощности, но при Р2 = 0 имеется некоторый ток холостого хода I0. К. п. д. изменяется примерно так же, как и в трансформаторе, сохраняя достаточно большое значение в сравнительно широком диапазоне нагрузки.
Наибольшее значение к. п. д. для асинхронных двигателей средней и большой мощности составляет 0,75—0,95 (машины большой мощности имеют соответственно больший к. п. д.). Коэффициент мощности cos?1 асинхронных двигателей средней и большой мощности при полной нагрузке равен 0,7—0,9. Следовательно, они загружают электрические станции и сети значительными реактивными токами (от 70 до 40% номинального тока), что является существенным недостатком этих двигателей.
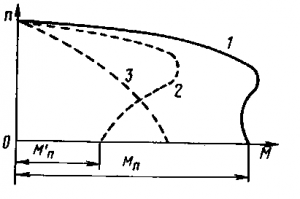 Рис.
263. Механическая характеристика
асинхронного двигателя с повышенным
пусковым моментом (с двойной беличьей
клеткой)
Рис.
263. Механическая характеристика
асинхронного двигателя с повышенным
пусковым моментом (с двойной беличьей
клеткой)
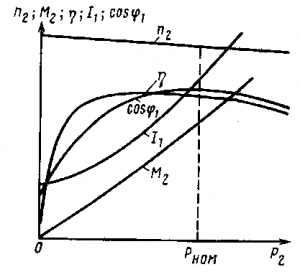 Рис.
264. Рабочие характеристики асинхронного
двигателя
Рис.
264. Рабочие характеристики асинхронного
двигателя
При нагрузках 25—50 % номинальной, которые часто встречаются при эксплуатации различных механизмов, коэффициент мощности уменьшается до неудовлетворительных с энергетической точки зрения значений (0,5—0,75).
При снятии нагрузки с двигателя коэффициент мощности уменьшается до значений 0,25—0,3, поэтому нельзя допускать работу асинхронных двигателей при холостом ходе и значительных недогрузках.
Работа при пониженном напряжении и обрыве одной из фаз. Понижение напряжения сети не оказывает существенного влияния на частоту вращения ротора асинхронного двигателя. Однако в этом случае сильно уменьшается наибольший вращающий момент, который может развить асинхронный двигатель (при понижении напряжения на 30% он уменьшается примерно в 2 раза). Поэтому при значительном падении напряжения двигатель может остановиться, а при низком напряжении — не включиться в работу.
На э. п. с. переменного тока при уменьшении напряжения в контактной сети соответственно уменьшается и напряжение в трехфазной сети, от которой питаются асинхронные двигатели, приводящие во вращение вспомогательные машины (вентиляторы, компрессоры, насосы). Для того чтобы обеспечить нормальную работу асинхронных двигателей при пониженном напряжении (они должны нормально работать при уменьшении напряжения до 0,75Uном), мощность всех двигателей вспомогательных машин на э. п. с. берется примерно в 1,5—1,6 раза большей, чем это необходимо для привода их при номинальном напряжении. Такой запас по мощности необходим также из-за некоторой несимметрии фазных напряжений, так как на э. п. с. асинхронные двигатели питаются не от трехфазного генератора, а от расщепителя фаз. При несимметрии напряжений фазные токи двигателя будут неодинаковы и сдвиг между ними по фазе не будет равен 120°. В результате по одной из фаз будет протекать больший ток, вызывающий увеличенный нагрев обмоток данной фазы. Это заставляет ограничивать нагрузку двигателя по сравнению с работой его при симметричном напряжении. Кроме того, при несимметрии напряжений возникает не круговое, а эллиптическое вращающееся магнитное поле и несколько изменяется форма механической характеристики двигателя. При этом уменьшаются его наибольший и пусковой моменты. Несимметрию напряжений характеризуют коэффициентом несимметрии, который равен среднему относительному (в процентах) отклонению напряжений в отдельных фазах от среднего (симметричного) напряжения. Систему трехфазных напряжений принято считать практически симметричной, если этот коэффициент меньше 5 %.
При обрыве одной из фаз двигатель продолжает работать, но по неповрежденным фазам будут протекать повышенные токи, вызывающие увеличенный нагрев обмоток; такой режим не должен допускаться. Пуск двигателя с оборванной фазой невозможен, так как при этом не создается вращающееся магнитное поле, вследствие чего ротор двигателя не будет вращаться.
Использование асинхронных двигателей для привода вспомогательных машин э. п. с. обеспечивает значительные преимущества по сравнению с двигателями постоянного тока. При уменьшении напряжения в контактной сети частота вращения асинхронных двигателей, а следовательно, и подача компрессоров, вентиляторов, насосов практически не изменяются. В двигателях же постоянного тока частота вращения пропорциональна питающему напряжению, поэтому подача этих машин существенно уменьшается.
3
studfile.net
Рабочие характеристики асинхронного двигателя
Под потерей фазы понимают однофазный режим работы электродвигателя в результате отключения питания по одному из проводов трехфазной системы.
Причинами потери фазы электродвигателем могут быть: обрыв одного из проводов, сгорание одного из предохранителей; нарушение контакта в одной из фаз.
В зависимости от обстоятельств, при которых произошла потеря фазы, могут быть разные режимы работы электродвигателя и последствия, сопутствующие этим режимам. При этом следует принимать во внимание следующие факторы: схему соединения обмоток электродвигателя («звезда» или «треугольник»), рабочее состояние двигателя в момент потери фазы (потеря фазы может произойти до или после включения двигателя, во время работы под нагрузкой), степень загрузки двигателя и механическую характеристику рабочей машины, число электродвигателей, работающих при потере фазы, и их взаимное влияние.
Здесь следует обратить внимание на особенность рассматриваемого режима. В трехфазном режиме каждая фаза обмотки обтекается током, сдвинутым во времени на одну треть периода. При потере фазы две обмотки обтекаются одним и тем же током, в третьей фазе ток отсутствует. Несмотря на то, что концы обмоток присоединены к двумя фазным проводам трехфазной системы, токи в обеих обмотках совпадают по времени. Такой режим работы называется однофазным.
Магнитное поле, образованное однофазным током, в отличие от вращающегося поля, образованного трехфазной системой токов, является пульсирующим. Оно изменяется во времени, но не перемещается по окружности статора. На рисунке 1, а показан вектор магнитного потока, создаваемого в двигателе при однофазном режиме. Этот вектор не вращается, а лишь изменяется по величине и знаку. Круговое поле сплющивается до прямой линии.
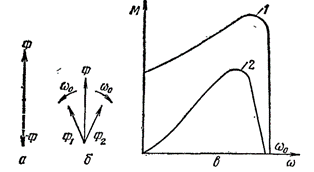
Рисунок 1. Характеристики асинхронного двигателя в однофазном режиме: а — графическое изображение пульсирующего магнитного поля; б — разложение пульсирующего поля на два вращающихся; в — механические характеристики асинхронного двигателя в трехфазном (1) и однофазном (2) режимах работы.
Пульсирующее магнитное поле можно рассматривать состоящим из двух вращающихся навстречу друг другу равных по величине полей (рис. 1, б). Каждое поле взаимодействует с обмоткой ротора и образует вращающий момент. Их суммарное действие создает вращающий момент на валу двигателя.
В том случае, когда потеря фазы произошла до включения двигателя в сеть, на неподвижный ротор действуют два магнитных поля, которые образуют два противоположных по знаку, но равных по величине момента. Их сумма будет равна нулю. Поэтому при пуске двигателя в однофазном режиме он не может развернуться даже при отсутствии нагрузки на валу.
Если потеря фазы произошла в то время, когда ротор двигателя вращался, то на его валу образуется вращающий момент. Это можно объяснить следующим образом. Вращающийся ротор по разному взаимодействует с вращающимися навстречу друг другу полями. Одно из них, вращение которого совпадает с вращением ротора, образует положительный (совпадающий по направлению) момент, другое — отрицательный. В отличие от случая с неподвижным ротором эти моменты будут разными по величине. Их разность будет равна моменту на валу двигателя.
На рисунке 1, в показана механическая характеристика двигателя в однофазном и трехфазном режимах работы. При нулевой скорости момент равен нулю, при появлении вращения в любую сторону на валу двигателя возникает момент.
Если отключение одной из фаз произошло во время работы двигателя, когда его скорость была близка к номинальному значению, вращающий момент часто бывает достаточным для продолжения работы с небольшим снижением скорости. В отличие от трехфазного симметричного режима появляется характерное гудение. В остальном внешние проявления аварийного режима не наблюдаются. Человек, не имеющий опыта работы с асинхронными двигателями, может не заметить изменения характера работы электродвигателя.
Переход электродвигателя в однофазный режим сопровождается перераспределением токов и напряжений между фазами. Если обмотки двигателя соединены по схеме «звезда», то после потери фазы образуется схема, показанная на рисунке 2. Две последовательно соединенные обмотки двигателя оказываются включенными на линейное напряжение Uаb, двигатель при этом оказывается в однофазном режиме работы.
Сделаем небольшой расчет, определим токи, протекающие по обмоткам двигателя и сравним их с токами при трехфазном питании.

Рисунок 2. Соединение обмоток двигателя по схеме «звезда» после потерн фазы
Так как сопротивления Zа и Zв соединены последовательно, напряжения на фазах А и В будут равны половине линейного:

Приближенно величину тока можно определить исходя из следующих соображений.
Пусковой ток фазы А при потере фазы
Пусковой ток фазы А при трехфазном режиме

где Uao — фазовое напряжение сети.
Отношение пусковых токов:

Из соотношения следует, что при потере фазы пусковой ток составляет 86% от величины пускового тока при трехфазном питании. Если учесть, что пусковой ток короткозамкнутого асинхронного двигателя в 6 — 7 раз больше номинального, то получается, что по обмоткам двигателя протекает ток Iiф = 0,86 х 6 = 5,16 Iн, т. е. в пять с лишним раз превышающий номинальный. За короткий промежуток времени такой ток перегреет обмотку.
Из приведенного расчета видно, что рассматриваемый режим работы весьма опасен для двигателя и в случае его возникновения защита должна отключить с незначительной выдержкой времени.
Потеря фазы может произойти и после включения двигателя, когда его ротор будет иметь скорость вращения, соответствующую рабочему режиму. Рассмотрим токи и напряжения обмоток в случае перехода в однофазный режим при вращающемся роторе.
Величина Za зависит от скорости вращения. При пуске, когда скорость вращения ротора равна нулю, она одинакова как для трехфазного, так и для однофазного режима. В рабочем режиме в зависимости от нагрузки и механической характеристики двигателя скорость вращения может быть разной. Поэтому для анализа токовых нагрузок необходим другой подход.
Будем считать, что как в трехфазном, так и в однофазном режиме двигатель развивает. одинаковую мощность. Независимо от схемы включения электродвигателя рабочая машина требует ту же самую мощность, которая необходима для выполнения технологического процесса.
Полагая мощности на валу двигателя равными для обоих режимов, будем иметь:
при трехфазном режиме

при однофазном режиме
где Ua — фазовое напряжение сети; Uao — напряжение на фазе А в однофазном режиме, cos φ3 и cos φ1 — коэффициенты мощности при трехфазном и однофазном режимах соответственно.
Опыты с асинхронным двигателем показывают, что фактически ток возрастает почти вдвое. С некоторым запасом можно считать I1a / I2a = 2.
Для того чтобы судить о степени опасности однофазного режима работы, нужно также знать загрузку двигателя.
В первом приближении будем считать ток электродвигателя в трехфазном режиме пропорциональным его нагрузке на валу. Такое допущение справедливо при нагрузках более 50% от номинального значения. Тогда можно написать Iф = Kз х Iн, где Kз — коэффициент загрузки двигателя, Iн — номинальный ток двигателя.
Ток при однофазном режиме I1ф = 2Kзх Iн, т. е. ток при однофазном режиме будет зависеть от загрузки двигателя. При номинальной нагрузке он равен двойному номинальному току. При нагрузке менее 50% потеря фазы при соединении обмоток двигателя в «звезду» не создает опасного для обмоток превышения тока. В большинстве случаев коэффициент загрузки двигателя меньше единицы. При его значениях порядка 0,6 — 0,75 следует ожидать небольшого превышения тока (на 20— 50%) по сравнению с номинальным. Это существенно для работы защиты, так как именно в этой области перегрузок она действует недостаточно четко.
Для анализа некоторых способов защиты необходимо знать напряжение на фазах двигателя. При заторможенном роторе напряжение на фазах А и В будет равно половине линейного напряжения Uab, а напряжение на фазе С будет равно нулю.
Иначе распределяется напряжение при вращающемся роторе. Дело в том, что его вращение сопровождается образованием вращающегося магнитного поля, которое, действуя на обмотки статора, наводит в них электродвижущую силу. Величина и фаза этой электродвижущей силы таковы, что при скорости вращения, близкой к синхронной, на обмотках восстанавливается симметричная система трехфазного напряжения, а напряжение нейтрали звезды (точка 0) становится равным нулю. Таким образом, при изменении скорости вращения ротора от нуля до синхронной в однофазном режиме работы напряжение на фазах А и В изменяется от значения, равного половине линейного, до значения, равного фазовому напряжению сети. Например, в системе напряжения 380/220 В напряжение на фазах А и В изменяется в пределах 190 — 220 В. Напряжение Uco изменяется от нуля при заторможенном роторе до фазового напряжения 220 В при синхронной скорости. Что же касается напряжения в точке 0, то оно изменяется от значения Uab/2 — до нуля при синхронной скорости.
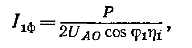
Если обмотки двигателя соединены по схеме «треугольник», то после потери фазы мы будем иметь схему соединений, показанную на рисунке 3. В этом случае обмотка двигателя с сопротивлением Zab оказывается включенной на линейное напряжение Uab, а обмотка с сопротивлениями Zfc и Zbc — соединенной последовательно и включенной на то же самое линейное напряжение.
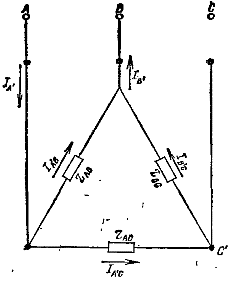
Рисунок 3. Соединение обмоток электродвигателя по схеме «треугольник» после потери фазы
В пусковом режиме по обмоткам АВ будет протекать такой же ток, как и при трехфазном варианте, а по обмоткам АС и ВС будет протекать ток в два раза меньший, так как эти обмотки соединены последовательно.
Токи в линейных проводах I’a=I’b будут равны сумме токов в параллельных ветвях: I’А = I’ab + I’bc = 1,5 Iab
Таким образом, в рассматриваемом случае при потере фазы пусковой ток в одной из фаз будет равен пусковому току при трехфазном питании, а линейный ток возрастает менее интенсивно.
Для расчета токов в случае потери фазы после включения двигателя в работу применим тот же метод, что и для схемы «звезда». Будем считать, что как в трехфазном, так и в однофазном режимах двигатель развивает одинаковую мощность.
В этом режиме работы ток в наиболее нагруженной фазе при потере фазы увеличивается вдвое по сравнению с током при трехфазном питании. Ток в линейном проводе будет равен I’А = 3Iab, а при трехфазном питании Ia = 1,73 Iab.
Здесь важно отметить, что в то время как фазовый ток возрастает в 2 раза, линейный ток увеличивается только в 1,73 раза. Это существенно, так как токовая защита реагирует на линейные токи. Расчеты и выводы относительно влияния коэффициента загрузки на ток однофазного режима при соединении «звезда» остаются в силе и для случая схемы «треугольник».
Напряжения на фазах АС и ВС будут зависеть от скорости вращения ротора. При заторможенном роторе Uac’ = Ubc’ = Uab/2
При скорости вращения, равной синхронной, восстанавливается симметричная система напряжений, т. е. Uac’ = Ubc’ = Uab.
Таким образом, напряжения на фазах АС и ВС при изменениях скорости вращения от нуля до синхронной будут меняться от значения, равного половине линейного, до значения, равного линейному напряжению.
Токи и напряжения на фазах двигателя при однофазном режиме зависят также и от числа двигателей.
Часто обрыв фазы происходит из-за перегорания одного из предохранителей на питающем фидере подстанции или распределительного устройства. В результате в однофазном режиме оказывается группа потребителей, взаимно влияющих друг на друга. Распределение токов и напряжений зависит от мощности отдельных двигателей и их нагрузки. Здесь возможны различные варианты. Если мощности электродвигателей равны, а их нагрузка одинакова (например, группа вытяжных вентиляторов), то всю группу двигателей можно заменить одним эквивалентным.
studfile.net
Электродвигатель. Виды и применение. Работа и устройство
Электродвигатель представляет электромашину, перестраивающую электрическую энергию в механическую. Обычно электрическая машина реализует механическую работу благодаря потреблению приложенной к ней электроэнергии, преобразовывающейся во вращательное движение. Ещё в технике есть линейные двигатели, способные создавать сразу поступательное движение рабочего органа.
Особенности конструкции и принцип действия
Не важно какое конструктивное исполнение, но устройство любых электродвигателей однотипное. Ротор и статор находятся внутри цилиндрической проточки. Вращение ротора возбуждают магнитное поле, отталкивающее его полюса от статора (неподвижной обмотки). Сохранять постоянное отталкивание можно путём перекоммутации обмоток ротора, или образовав вращающееся магнитное поле непосредственно в статоре. Первый способ присущий коллекторным электродвигателям, а второй — асинхронным трехфазным.
Корпус любых электродвигателей обычно чугунный или выполнен из сплава алюминия. Однотипные двигатели, не смотря на конструкцию корпуса производятся с одинаковыми установочными размерами и электрическими параметрами.
Работа электродвигателя базируется на принципах электромагнитной индукции. Магнитная и электрическая энергия создают электродвижущуюся силу в замкнутом контуре, проводящем ток. Это свойство заложено в работу любой электромашины.
На движущийся электроток в середине магнитного поля постоянно воздействует механическая сила, стремительно пытающаяся отклонить направление зарядов в перпендикулярной силовым магнитным линиям плоскости. Во время прохождения электротока по металлическому проводнику либо катушке, механическая сила норовит подвинуть или развернуть всю обмотку и каждый проводник тока.
Назначение и применение электродвигателей
Электрические машины имеют много функций, они способны усиливать мощность электрических сигналов, преобразовывать величины напряжения либо переменный ток в постоянный и др. Для выполнения таких разных действий существуют многообразные типы электромашин. Двигатель представлят тип электрических машин, рассчитанных для преобразования энергии. А именно, этот вид устройств превращает электроэнергию в двигательную силу или механическую работу.
Он пользуется большим спросом во многих отраслях. Их широко используется в промышленности, на станках различного предназначения и в других установках. В машиностроении, к примеру, землеройных, грузоподъёмных машинах. Также они распространены в сферах народного хозяйства и бытовых приборах.
Классификация электродвигателей
Электродвигатель, является разновидностью электромашин по:
- Специфике, создающегося вращательного момента:
— гистерезисные;
— магнитоэлектрические. - Строению крепления:
— с горизонтальным расположением вала;
— с вертикальным размещением вала. - Защите от действий внешней среды:
— защищённые;
— закрытые;
— взрывонепроницаемые.
В гистерезисных устройствах вращающий момент образуется путём перемагничивания ротора или гистерезиса (насыщения). Эти двигатели мало эксплуатируются в промышленности и не считаются традиционными. Востребованными являются магнитоэлектрические двигатели. Существует много модификаций этих двигателей.
Их разделяют на большие группы по типу протекающего тока:
- Постоянного тока.
- Переменного тока.
- Универсальные двигатели (работают на постоянном переменном токе).
Особенности магнитоэлектрических двигателей постоянного тока
С помощью двигателей постоянного тока создают регулируемые электрические приводы с высокими эксплуатационными и динамическими показателями.
Типы электродвигателей:
- С электромагнитами.
- С постоянными магнитами.
Группа электродвигателей, питание которых выполняется постоянным током, подразделяется на подвиды:
- Коллекторные. В этих электроприборах присутствует щёточно-коллекторный узел, обеспечивающий электрическое соединение неподвижной и вращающейся части двигателя. Устройства бывают с самовозбуждением и независимым возбуждением от постоянных магнитов и электромагнитов.
- Выделяют следующие виды самовозбуждения двигателей:
— параллельное;
— последовательное;
— смешанное. - Коллекторные устройства имеют несколько минусов:
— низкая надёжность приборов;
— щёточно-коллекторный узел довольно сложная в обслуживании составляющая часть магнитоэлектрического двигателя. - Безколлекторные (вентильные). Это двигатели с замкнутой системой, работающие по аналогичному принципу работы синхронных устройств. Оснащены датчиком положения ротора, преобразователем координат, а также инвертором силовым полупроводниковым преобразователем.
Эти машины выпускаются различных размеров от самых маленьких низковольтных до громадных размеров (в основном до мегаватта). Миниатюрными электродвигателями оснащены компьютеры, телефоны, игрушки, аккумуляторные электроинструменты и т.п.
Применение, плюсы и минусы электродвигателей постоянного тока
Электромашины постоянного тока применяют в разных областях. Ими комплектуют подъёмно-транспортные, красочно-отделочные производственные машины, а также полимерное, бумажное производственное оборудование и т.д. Часто электрический двигатель этого типа встраивают в буровые установки, вспомогательные агрегаты экскаваторов и другие виды электротранспорта.
Преимущества электрических двигателей:
- Лёгкость в управлении и регулировании частоты вращения.
- Простота конструкции.
- Отменные пусковые свойства.
- Компактность.
- Возможность эксплуатации в разных режимах (двигательном и генераторном).
Минусы двигателей:
- Коллекторные двигатели требуют трудное профилактическое обслуживание щёточно-коллекторных узлов.
- Дороговизна производства.
- Коллекторные устройства имеют не большой срок службы из-за изнашивания самого коллектора.
Электродвигатель переменного тока
В электродвигателях переменного тока электроток описывается по синусоидальному гармоническому закону, периодично меняющему свой знак (направление).
Статор этих устройств изготавливают из ферромагнитных пластинок, имеющих пазы для помещения в них витков обмотки с конфигурацией катушки.
Электродвигатели по принципу работы бывают синхронными и асинхронными. Главным их отличием является то, что скорость магнитодвижущей силы статора в синхронных приборах равна скорости вращения ротора, а в асинхронных двигателях эти скорости не совпадают, обычно ротор вращается медленнее поля.
Синхронный электродвигатель
Из-за одинакового (синхронного) вращения ротора с магнитным полем, аппараты именуют синхронными электродвигателями. Их подразделяют на подвиды:
- Реактивный.
- Шаговый.
- Реактивно-гистерезисный.
- С постоянными магнитами.
- С обмотками возбуждения.
- Вентильный реактивный.
- Гибридно-реактивный синхронный двигатель.
Большая часть компьютерной техники оснащена шаговыми электродвигателями. Преобразование энергии в этих устройствах основано на дискретно угловом передвижении ротора. Шаговый электродвигатель имеет высокую продуктивность, независящую от их мизерных размеров.
Достоинства синхронных двигателей:
- Стабильность частоты вращения, что не зависит от механических нагрузок на валу.
- Низкая чувствительность к скачкам напряжения.
- Могут выступать в роли генератора мощности.
- Снижают потребление мощности, предоставляемой электростанциями.
Недостатки в синхронных устройствах:
- Сложности с запуском.
- Сложность конструкции.
- Затруднения в регулировки частоты вращения.
Недостатки синхронного двигателя, делают более выгодным для использования электродвигатель асинхронного типа. Тем не менее, большинство синхронных двигателей из-за их работы с постоянной скоростью востребованы для установок в компрессоры, генераторы, насосы, а также крупные вентиляторы и пр. оборудование.
Асинхронный электродвигатель
Статор асинхронных двигателей представляет распределённую двухфазную, трехфазную, реже многофазную обмотку. Ротор выполняют в виде цилиндра, используя медь, алюминий либо металл. В его пазы залиты либо запрессованные токопроводящие жилы к оси вращения под определённым углом. Они соединяются в одно целое на торцах ротора. Противоток возбуждается в роторе от переменного магнитного поля статора.
По конструктивным особенностям выделяют два вида асинхронных двигателей:
- С фазным ротором.
- С короткозамкнутым ротором.
В остальном конструкция приборов не имеет отличий, статор у них абсолютно одинаковый. По числу обмоток выделяют такие электродвигатели:
- Однофазные. Этот тип двигателей самостоятельно не запускается, ему требуется стартовый толчок. Для этого применяется пусковая обмотка либо фазосдвигающая цепь. Также приборы запускаются вручную.
- Двухфазные. В этих устройствах присутствуют две обмотки со смещёнными на угол фазами. В приборе возникает вращающееся магнитное поле, напряженность которого в полюсах одной обмотки нарастает и синхронно спадает в другой.
Двухфазный электродвигатель может самостоятельно запускаться, но с реверсом присутствуют сложности. Часто этот тип устройств подключают к однофазным сетям, включая вторую фазу через конденсатор. - Трехфазные. Достоинством этих типов электродвигателей является легкий реверс. Основные части двигателя – это статор с тремя обмотками и ротор. Позволяет плавно регулировать скорость ротора. Эти приборы довольно востребованы в промышленности и технике.
- Многофазные. Состоят эти устройства из встроенной многофазной обмотки в пазах статора на его внутренней поверхности. Эти двигатели гарантируют высокую надёжность при эксплуатации и считаются усовершенствованными моделями двигателей.
Асинхронные электрические двигатели значительно облегчают работу людей, поэтому они незаменимы во многих сферах.
Достоинствами этих приборов, которые сыграли роль в их популярности, являются следующие моменты:
- Простота производства.
- Высокая надёжность.
- Не нуждаются в преобразователях для включения в сеть.
- Небольшие расходы при эксплуатации.
Ко всему этому, можно добавить относительную стоимость асинхронных приборов. Но они также имеют и недостатки:
- Невысокий коэффициент мощности.
- Трудность в точной регулировке скорости.
- Маленький пусковой момент.
- Зависимость от напряжения сети.
Но благодаря питанию электродвигателя с помощью частотного преобразователя, некоторые недостатки устройств устраняются. Поэтому потребность асинхронных моторов не падает. Их применяют в приводах разных станков в областях металлообработки, деревообработки и пр. В них нуждаются ткацкие, швейные, землеройные, грузоподъёмные и другие виды машин, а также вентиляторы, насосы, центрифуги, разные электроинструменты и бытовые приборы.
Похожие темы:
electrosam.ru
Тема лекции 10 Механические характеристики электродвигателей план лекции
1.Естественные и искусственные механические характеристики электродвигателей
Жесткостьмеханических характеристик
Естественная механическая характеристика двигателя постоянного тока параллельного возбуждения
Естественная механическая характеристика двигателя постоянного тока последовательного возбуждения
Естественная механическая характеристика асинхронного двигателя
Механическая характеристика синхронного двигателя.Область применения синхронных двигателей на судах
Механической
характеристикой двигателя, независимо
от рода тока, называют зависимость
угловой скорости вала электродвигателя
ω (далее – двигателя) от электромагнитного
момента двигателя  ,
т.е зависимость ω (
,
т.е зависимость ω ( ).
).
Здесь
следует сделать важное замечание: в
соответствии с уравнением моментов, в
установившемся режиме  =
=
 ,
электромагнитный момент двигателя
уравновешивается
статическим
моментом
(моментом
сопротивления)
механизма. Это означает, что величина
электромагнитного момента двигателя
полностью зависит от момента механизма –
чем больше тормозной момент механизма,
тем больше вращающий момент двигателя,
и наоборот.
,
электромагнитный момент двигателя
уравновешивается
статическим
моментом
(моментом
сопротивления)
механизма. Это означает, что величина
электромагнитного момента двигателя
полностью зависит от момента механизма –
чем больше тормозной момент механизма,
тем больше вращающий момент двигателя,
и наоборот.
То есть, для любого двигателя входной величиной является момент механизма, а выходной – его скорость.
Скорость почти всех электродвигателей является убывающей функцей момента двигателя, то есть с увеличением момента скорость уменьшается [чил 33]. Но степень изменения скорости у разных электродвигателей различна и характерезуется параметром жесткость механические характеристик.
Жёсткость механические характеристик электропривода β – это отношение разности электромагнитных моментов двигателя при разных скоростях к соответствующуй разности угловых скоростей электропривода.
β
= (М2– М1)/(
ω2 – ω1)=
Δ / Δω
/ Δω
Обычно на рабочих участках механические характеристики электродвигателей имеют отрицательную жёсткость β < 0, так как( ω2< ω1,
М1< М2) при большей скорости электромагнитный момент меньше.
Различают естественные и искусственные механические характеристики электродвигателей.
Естественная механическая характеристика – это зависимость ω(), снятаяпри нормальных условиях работы двигателя, т.е. при номинальных параметрах питающей сети и отсутствии добавочных резисторов в цепях обмоток двигателей.
К параметрам питающей сети относятся: при постоянном токе – напряжение, при переменном токе – напряжение и частота тока.
Характеристики, снятые при условиях, отличных от нормальных, называют искусственными.
Искусственные характеристики можно получить путем изменения параметров двигателя, например, путем введения резисторов в цепь обмотки якоря двигателя постоянного тока или в цепь обмотки ротора асинхронного двигателя, либо изменением параметров питающей сети, т.е. напряжения и частоты переменного тока.
Каждый электродвигатель имеет одну естественную и множество искусственных характеристик. Число искусственных характеристик зависит от числа ступеней регулирующего элемента, например, числа ступеней регулировочного реостата в цепи обмотки якоря двигателя постоянного тока. Если у двигателя таких ступеней – пять, то такой двигатель имеет шесть характеристик – пять искусственных и одну естественную.
Искусственные механические характеристики применяются для получения таких режимов работы двигателя, как регулирование скорости, реверс, электрическое торможение, и др.
Рассмотрим естественные механические характеристики двигателей разных типов.
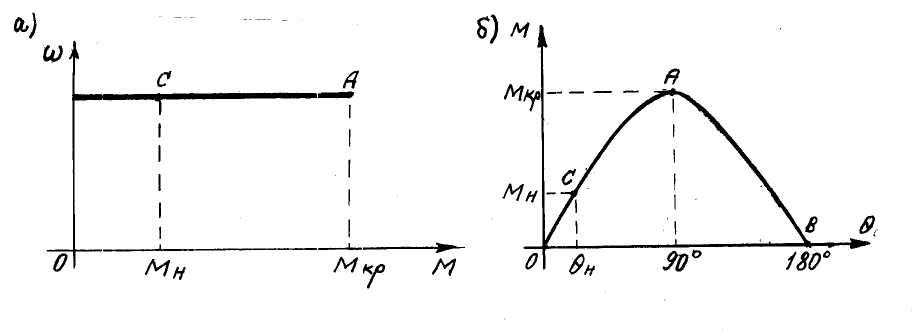
Рис. 10.1 Естественная механическая (а) и угловая (б) характеристики синхронного двигателя; θ – угол отставания оси ротора от оси магнитного поля обмотки статора
studfile.net